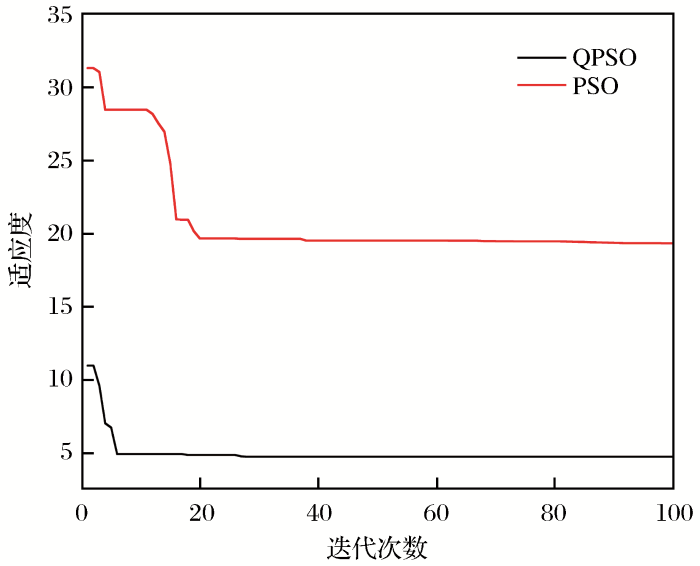
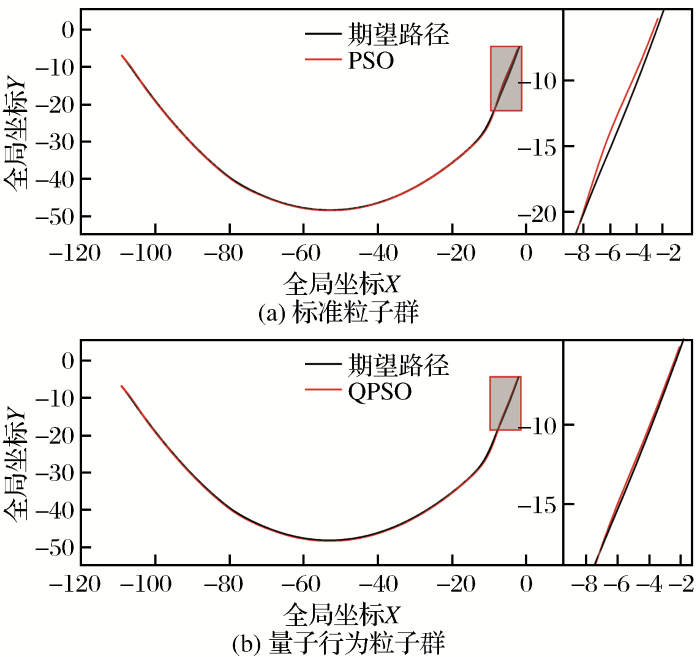
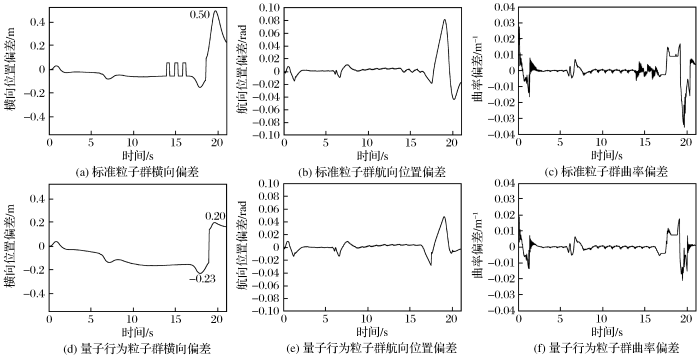
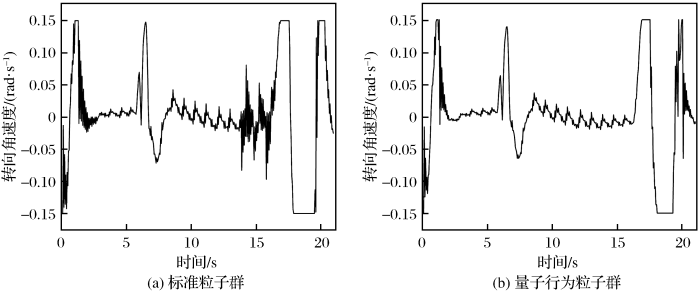
With the increase of mining depth,the mining operation environment is worse and worse.It is of great significance to realize the underground unmanned load-haul-dump(LHD) machine to ensure the safe and efficient production of mine enterprises.In underground operation,the long,low articulated body of under-ground LHD machine has the characteristics of high mass,high inertia and high steering delay,which makes the precise tracking of the scraper path a difficult point for its realization of unmanned driving.As an important technique of path tracing control,the control algorithm based on optimization principle often has the problem of parameter selection and adjustment.In industrial applications,manual trial-and-error methods are commonly used for parameter selection.This method not only consumes a lot of human and time costs,but also makes it difficult to ensure the accuracy because of the lack of relevant experience of the operator.In this paper,the method of parameter optimization for linear quadratic regulator(LQR) state feedback controller by quantum-behaved particle swarm optimization(QPSO) algorithm was proposed.The LQR state feedback controller was cons-tructed based on error dynamics model.After parameter optimization,the maximum lateral error of path tracking is not more than 0.23 m.In a large number of repeated experiments,it is found that the standard particle swarm optimization(PSO) algorithm is difficult to find the proper parameter that can make the controller cross deviation lower than 0.5 m in 100 iterations.The QPSO algorithm has found the optimal parameter which meets the condition in the 10 repeated experiments.In 100 iterations,the fitness of the PSO algorithm tends to converge at 21 iterations,while that of the QPSO algorithm converges to a lower level than that of the PSO in the seventh iteration.The maximal lateral position deviation of the path tracking controller is reduced by 53.4%.It can be seen that the parameter optimization ability of the QPSO algorithm is obviously stronger than that of the PSO algorithm.The QPSO algorithm has faster optimization speed and higher success rate than the PSO algorithm.The control parameters of the LQR state feedback controller are automated by the QPSO algorithm.The design and parameter tuning process of the entire path tracking controller has important reference significance for realizing the unmanned driving of underground LHD machine.
Keywords:underground load-haul-dump machine
;
path tracking control
;
optimization of control parameters
;
particle swarm optimization
;
quantum particle swarm optimization
;
linear quadratic regulator
LIU Yongchun, WANG Liguan, WU Jiaxi. Optimization of Control Parameters for Underground Load-Haul-Dump Machine Based on LQR-QPSO[J]. Gold Science and Technology, 2021, 29(1): 25-34 doi:10.11872/j.issn.1005-2518.2021.01.167
地下铲运机是无轨化开采的关键设备,因其具有高效、灵活和生产费用低等优点而得到广泛应用(张栋林,2002)。智能化作业是未来矿山安全、高效、绿色生产的主要途径之一,地下铲运机的无人化可以大幅缩减井下作业人数(Shiroma et al.,2009)。当前铲运机的路径精确跟踪问题是实现无人驾驶的难点。井下作业中,地下铲运机细长、低矮的铰接式车身具有大质量、大惯性和大转向延迟的运动特点,使得路径跟踪极为复杂。目前,国内外尚无完善的无人驾驶铲运机产品用于实际作业(郭鑫等,2009)。
针对铰接式车辆的路径跟踪控制,Sasiadek et al.(2005)设计了一种分层结构模糊逻辑控制系统,借助自适应模糊控制器和模糊逻辑单元,铲运机可以获得相比传统控制算法更为平滑精准的控制效果。赵翾等(2015)使用Ackermann公式和指数趋近律设计了滑模变结构路径跟踪控制器,但其试验路径为曲率一致的正圆,且没有直行,无法验证其在井下巷道环境下的有效性。李建国等(2015)结合井下的特殊环境,将横向偏差和航向角偏差进行融合,提出了基于最优轨迹跟踪的PID控制策略,克服了单一误差反馈控制的局限。但PID控制器的参数整定较为繁琐,且当控制对象存在非线性、时变不确定性和强干扰等问题时,往往性能不佳(王勇,2000)。Nayl et al.(2015)建立了基于模型预测控制(Model Predictive Control,MPC)的横向控制算法,但在路径跟踪过程中车速较慢。孟宇等(2018)应用遗传算法(Genetic Algorithm,GA)对线性二次型调节器(Linear Guadratic Regulator,LQR)权重矩阵进行参数优化求解,提出了基于预见位置信息的最优状态反馈控制器,实现了铰接式车辆的精准路径跟踪。罗维东等(2020)提出了基于非线性模型预测控制(Nonlinear Model Predictive Control,NMPC)的反应式导航系统和对应的分段式局部路径决策策略,实现了地下无人铲运机在复杂巷道环境下的自主导航。
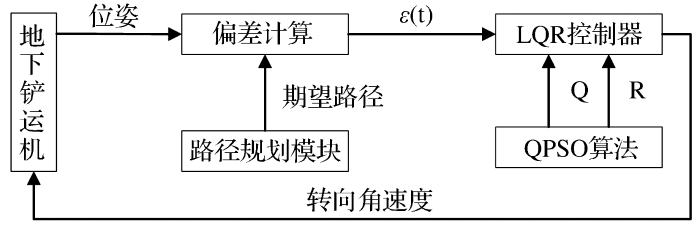
粒子群优化算法(Particle Swarm Optimization,PSO)(Kennedy et al.,1995)是一种基于种群的随机优化算法,与GA等进化计算技术有一些类似(Kemmoé et al.,2009)。但相较于其他算法,PSO具有易于实现、稳健性强、收敛特性稳定、全局搜索能力强以及动态性能好等特点(Gupta et al.,2014)。PSO算法中粒子的种群趋同现象会导致搜索结果陷入局部最优或过早的收敛,无法从根本上确保搜索结果必然收敛于全局最优解(Van den Bergh,2001)。为解决这一问题,Sun et al.(2004)提出了量子行为粒子群优化算法(Quantum-Behaved Particle Swarm Optimization,QPSO),通过增加粒子种群的随机性,提高了粒子种群的群体智能程度,有效地避免了优化结果过早收敛或陷入局部最优,在处理复杂的参数优化问题中更具优势(郑伟博,2016)。本文应用QPSO算法对基于误差动力学模型的LQR路径跟踪控制器进行参数优化,实现了对地下铲运机精准稳定的路径跟踪控制,为地下铲运机无人驾驶提供了新的解决方案。
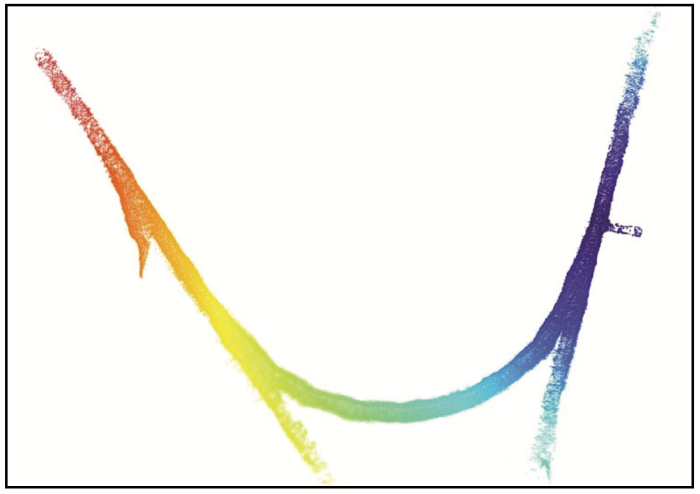
Fig.6
3D laser point cloud map of test reference laneways
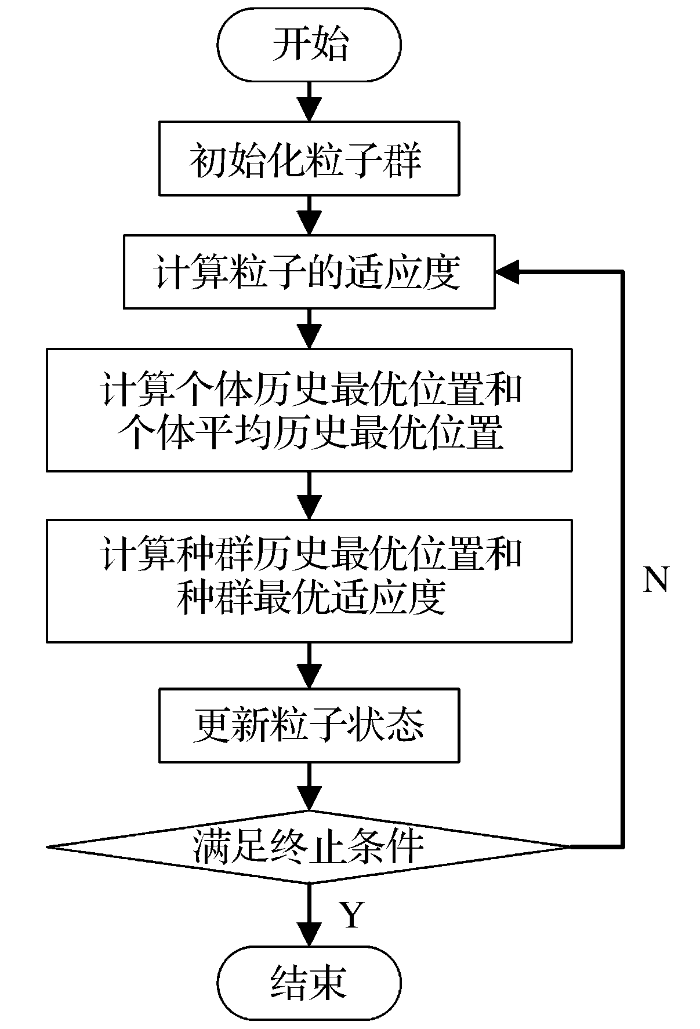
为了获得比较好的搜索能力和速度,种群规模N设置为50,迭代次数G设置为100(邹忱忱,2017);惯性权重w由0.9线性递减至0.4时,可以确保粒子群算法在初期具有较好的全局寻优能力,并且避免在迭代末期陷入局部最优(Shi et al.,1998);地下铲运机路径跟踪问题的优化过程中,对于粒子“个体认知”和“群体经验”没有相应的侧重点,可设定学习因子c1=c2=2;为兼顾搜索速度和精度,设置vmax=1,迭代时,粒子速度vi∈[-vmax,vmax];适当地给出粒子各元素的取值范围,可以在初始化粒子群后极大地缩短算法搜索最优值的时间,为了将初始种群的随机分布限制在适当范围内,令qmax=500;相比PSO算法,QPSO算法中唯一需要提前设置的参数仅有收缩—扩张系数α,与PSO算法中在惯性权重w的取值类似,将系数α设为固定值时,算法的优化性能有限,因此也可以用类似的线性递减策略设置系数α,其表达式为
Convergence analysis of quantum-behaved particle swarm optimization algorithm and study on its control parameter
0
2010
Navigation system research of unmanned scraper
0
2009
Optimal LQR controller in CSC based STATCOM using GA and PSO
1
2014
... 粒子群优化算法(Particle Swarm Optimization,PSO)(Kennedy et al.,1995)是一种基于种群的随机优化算法,与GA等进化计算技术有一些类似(Kemmoé et al.,2009).但相较于其他算法,PSO具有易于实现、稳健性强、收敛特性稳定、全局搜索能力强以及动态性能好等特点(Gupta et al.,2014).PSO算法中粒子的种群趋同现象会导致搜索结果陷入局部最优或过早的收敛,无法从根本上确保搜索结果必然收敛于全局最优解(Van den Bergh,2001).为解决这一问题,Sun et al.(2004)提出了量子行为粒子群优化算法(Quantum-Behaved Particle Swarm Optimization,QPSO),通过增加粒子种群的随机性,提高了粒子种群的群体智能程度,有效地避免了优化结果过早收敛或陷入局部最优,在处理复杂的参数优化问题中更具优势(郑伟博,2016).本文应用QPSO算法对基于误差动力学模型的LQR路径跟踪控制器进行参数优化,实现了对地下铲运机精准稳定的路径跟踪控制,为地下铲运机无人驾驶提供了新的解决方案. ...
Parameter selection of quantum-behaved particle swarm optimization
0
2007
Particle swarm optimization:A study of particle displacement for solving continuous and combinatorial optimization problems(Article)
1
2009
... 粒子群优化算法(Particle Swarm Optimization,PSO)(Kennedy et al.,1995)是一种基于种群的随机优化算法,与GA等进化计算技术有一些类似(Kemmoé et al.,2009).但相较于其他算法,PSO具有易于实现、稳健性强、收敛特性稳定、全局搜索能力强以及动态性能好等特点(Gupta et al.,2014).PSO算法中粒子的种群趋同现象会导致搜索结果陷入局部最优或过早的收敛,无法从根本上确保搜索结果必然收敛于全局最优解(Van den Bergh,2001).为解决这一问题,Sun et al.(2004)提出了量子行为粒子群优化算法(Quantum-Behaved Particle Swarm Optimization,QPSO),通过增加粒子种群的随机性,提高了粒子种群的群体智能程度,有效地避免了优化结果过早收敛或陷入局部最优,在处理复杂的参数优化问题中更具优势(郑伟博,2016).本文应用QPSO算法对基于误差动力学模型的LQR路径跟踪控制器进行参数优化,实现了对地下铲运机精准稳定的路径跟踪控制,为地下铲运机无人驾驶提供了新的解决方案. ...
Particle swarm optimization
2
1995
... 粒子群优化算法(Particle Swarm Optimization,PSO)(Kennedy et al.,1995)是一种基于种群的随机优化算法,与GA等进化计算技术有一些类似(Kemmoé et al.,2009).但相较于其他算法,PSO具有易于实现、稳健性强、收敛特性稳定、全局搜索能力强以及动态性能好等特点(Gupta et al.,2014).PSO算法中粒子的种群趋同现象会导致搜索结果陷入局部最优或过早的收敛,无法从根本上确保搜索结果必然收敛于全局最优解(Van den Bergh,2001).为解决这一问题,Sun et al.(2004)提出了量子行为粒子群优化算法(Quantum-Behaved Particle Swarm Optimization,QPSO),通过增加粒子种群的随机性,提高了粒子种群的群体智能程度,有效地避免了优化结果过早收敛或陷入局部最优,在处理复杂的参数优化问题中更具优势(郑伟博,2016).本文应用QPSO算法对基于误差动力学模型的LQR路径跟踪控制器进行参数优化,实现了对地下铲运机精准稳定的路径跟踪控制,为地下铲运机无人驾驶提供了新的解决方案. ...
... 粒子群算法(PSO)由生物学家Kennedy et al.(1995)提出,因具有参数较少、算法便于实现的优点和优良的优化性能而成为科研和工业应用领域的研究热点(方伟等,2010).Shi et al.(1998)将惯性权重引入了粒子群算法,再结合线性递减权重策略,可以获得更好的寻优结果,所建立的标准形式粒子群算法(刘洪波等,2006)的粒子更新公式[式(13)]及权重策略[式(14)]如下: ...
Optimal Control Theory and Application
0
2008
Auto-driving technology for underground scraper based on optimal trajectory tracking
0
2015
Convergence analysis of particle swarm optimization and its improved algorithm based on Chaos
0
2006
Reactive navigation system of underground unmanned Load-Haul-Dump unit based on NMPC
0
2020
LQR- GA path tracking control of articulated vehicle based on predictive information
0
2018
Effect of kinematic parameters on MPC based on-line motion planning for an articulated vehicle
1
2015
... 针对铰接式车辆的路径跟踪控制,Sasiadek et al.(2005)设计了一种分层结构模糊逻辑控制系统,借助自适应模糊控制器和模糊逻辑单元,铲运机可以获得相比传统控制算法更为平滑精准的控制效果.赵翾等(2015)使用Ackermann公式和指数趋近律设计了滑模变结构路径跟踪控制器,但其试验路径为曲率一致的正圆,且没有直行,无法验证其在井下巷道环境下的有效性.李建国等(2015)结合井下的特殊环境,将横向偏差和航向角偏差进行融合,提出了基于最优轨迹跟踪的PID控制策略,克服了单一误差反馈控制的局限.但PID控制器的参数整定较为繁琐,且当控制对象存在非线性、时变不确定性和强干扰等问题时,往往性能不佳(王勇,2000).Nayl et al.(2015)建立了基于模型预测控制(Model Predictive Control,MPC)的横向控制算法,但在路径跟踪过程中车速较慢.孟宇等(2018)应用遗传算法(Genetic Algorithm,GA)对线性二次型调节器(Linear Guadratic Regulator,LQR)权重矩阵进行参数优化求解,提出了基于预见位置信息的最优状态反馈控制器,实现了铰接式车辆的精准路径跟踪.罗维东等(2020)提出了基于非线性模型预测控制(Nonlinear Model Predictive Control,NMPC)的反应式导航系统和对应的分段式局部路径决策策略,实现了地下无人铲运机在复杂巷道环境下的自主导航. ...
Load haul dump vehicle kinematics and control
2
2003
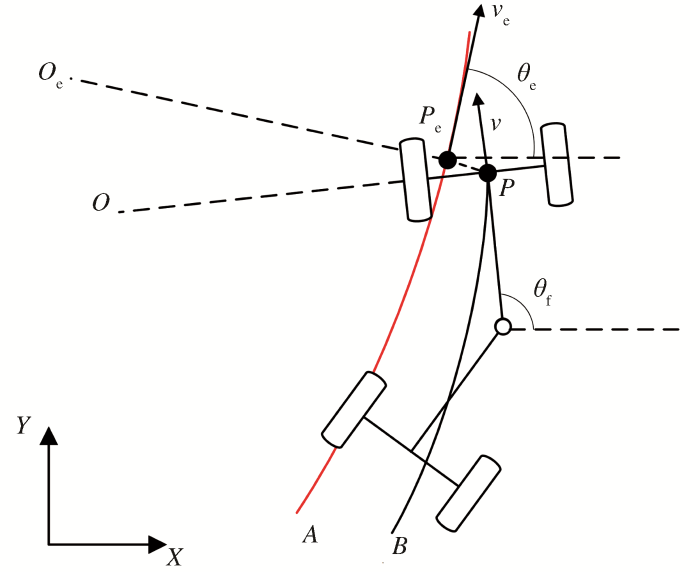
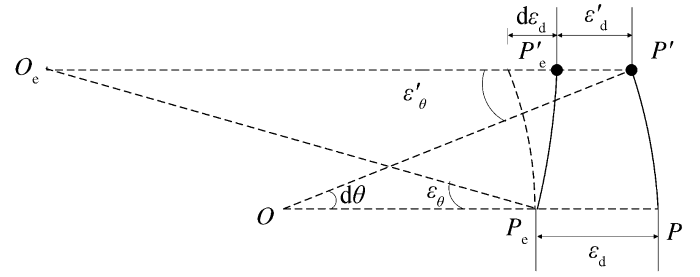
... 瞬时航向角θf与期望航向角θe的差值为航向角偏差εθ;地下铲运机定位参考点P与期望参考点Pe之间的距离为横向偏差量εd(以参考点P在期望路径右侧时为正);点P和期望参考点Pe处的曲率差值为曲率偏差ε,则有(Ridley et al.,2003): ...
... 考虑到地下铲运机较低的车速和较小的铰接转向角变化幅度,铰接转向角速度变化率在实际问题中几乎可以忽略不计.简化式(2)得到(Ridley et al.,2003): ...
Path tracking of an autonomous LHD articulated vehicle
1
2005
... 针对铰接式车辆的路径跟踪控制,Sasiadek et al.(2005)设计了一种分层结构模糊逻辑控制系统,借助自适应模糊控制器和模糊逻辑单元,铲运机可以获得相比传统控制算法更为平滑精准的控制效果.赵翾等(2015)使用Ackermann公式和指数趋近律设计了滑模变结构路径跟踪控制器,但其试验路径为曲率一致的正圆,且没有直行,无法验证其在井下巷道环境下的有效性.李建国等(2015)结合井下的特殊环境,将横向偏差和航向角偏差进行融合,提出了基于最优轨迹跟踪的PID控制策略,克服了单一误差反馈控制的局限.但PID控制器的参数整定较为繁琐,且当控制对象存在非线性、时变不确定性和强干扰等问题时,往往性能不佳(王勇,2000).Nayl et al.(2015)建立了基于模型预测控制(Model Predictive Control,MPC)的横向控制算法,但在路径跟踪过程中车速较慢.孟宇等(2018)应用遗传算法(Genetic Algorithm,GA)对线性二次型调节器(Linear Guadratic Regulator,LQR)权重矩阵进行参数优化求解,提出了基于预见位置信息的最优状态反馈控制器,实现了铰接式车辆的精准路径跟踪.罗维东等(2020)提出了基于非线性模型预测控制(Nonlinear Model Predictive Control,NMPC)的反应式导航系统和对应的分段式局部路径决策策略,实现了地下无人铲运机在复杂巷道环境下的自主导航. ...
A modified particle swarm optimizer
2
1998
... 粒子群算法(PSO)由生物学家Kennedy et al.(1995)提出,因具有参数较少、算法便于实现的优点和优良的优化性能而成为科研和工业应用领域的研究热点(方伟等,2010).Shi et al.(1998)将惯性权重引入了粒子群算法,再结合线性递减权重策略,可以获得更好的寻优结果,所建立的标准形式粒子群算法(刘洪波等,2006)的粒子更新公式[式(13)]及权重策略[式(14)]如下: ...
... 为了获得比较好的搜索能力和速度,种群规模N设置为50,迭代次数G设置为100(邹忱忱,2017);惯性权重w由0.9线性递减至0.4时,可以确保粒子群算法在初期具有较好的全局寻优能力,并且避免在迭代末期陷入局部最优(Shi et al.,1998);地下铲运机路径跟踪问题的优化过程中,对于粒子“个体认知”和“群体经验”没有相应的侧重点,可设定学习因子c1=c2=2;为兼顾搜索速度和精度,设置vmax=1,迭代时,粒子速度vi∈[-vmax,vmax];适当地给出粒子各元素的取值范围,可以在初始化粒子群后极大地缩短算法搜索最优值的时间,为了将初始种群的随机分布限制在适当范围内,令qmax=500;相比PSO算法,QPSO算法中唯一需要提前设置的参数仅有收缩—扩张系数α,与PSO算法中在惯性权重w的取值类似,将系数α设为固定值时,算法的优化性能有限,因此也可以用类似的线性递减策略设置系数α,其表达式为 ...
Nonlinear straight path tracking control for an articulated steering type vehicle
1
2009
... 地下铲运机是无轨化开采的关键设备,因其具有高效、灵活和生产费用低等优点而得到广泛应用(张栋林,2002).智能化作业是未来矿山安全、高效、绿色生产的主要途径之一,地下铲运机的无人化可以大幅缩减井下作业人数(Shiroma et al.,2009).当前铲运机的路径精确跟踪问题是实现无人驾驶的难点.井下作业中,地下铲运机细长、低矮的铰接式车身具有大质量、大惯性和大转向延迟的运动特点,使得路径跟踪极为复杂.目前,国内外尚无完善的无人驾驶铲运机产品用于实际作业(郭鑫等,2009). ...
Particle swarm optimization with particles having quantum behavior
2
2004
... 粒子群优化算法(Particle Swarm Optimization,PSO)(Kennedy et al.,1995)是一种基于种群的随机优化算法,与GA等进化计算技术有一些类似(Kemmoé et al.,2009).但相较于其他算法,PSO具有易于实现、稳健性强、收敛特性稳定、全局搜索能力强以及动态性能好等特点(Gupta et al.,2014).PSO算法中粒子的种群趋同现象会导致搜索结果陷入局部最优或过早的收敛,无法从根本上确保搜索结果必然收敛于全局最优解(Van den Bergh,2001).为解决这一问题,Sun et al.(2004)提出了量子行为粒子群优化算法(Quantum-Behaved Particle Swarm Optimization,QPSO),通过增加粒子种群的随机性,提高了粒子种群的群体智能程度,有效地避免了优化结果过早收敛或陷入局部最优,在处理复杂的参数优化问题中更具优势(郑伟博,2016).本文应用QPSO算法对基于误差动力学模型的LQR路径跟踪控制器进行参数优化,实现了对地下铲运机精准稳定的路径跟踪控制,为地下铲运机无人驾驶提供了新的解决方案. ...
... Sun et al.(2004)将量子力学的部分概念引入粒子群算法,提出了量子行为粒子群优化算法(QPSO).在QPSO中,引入粒子的平均历史最优位置,表示粒子群内各粒子个体历史最优位置的平均值,其表达式为 ...
An Analysis of Particle Swarm Optimizers
0
2001
Research on Nonlinear PID Control
0
2000
Undergound LHD
0
2002
Sliding mode control algorithm for path tracking of articulated dump truck
0
2015
Research on Improvement of Particle Swarm Optimization Algorithm and Its Application
0
2016
Study on the Control of LQR Linear Two-stage Inverted Pendulum Based on Particle Swarm Optimization
0
2017
量子粒子群优化算法的收敛性分析及控制参数研究
1
2010
... 粒子群算法(PSO)由生物学家Kennedy et al.(1995)提出,因具有参数较少、算法便于实现的优点和优良的优化性能而成为科研和工业应用领域的研究热点(方伟等,2010).Shi et al.(1998)将惯性权重引入了粒子群算法,再结合线性递减权重策略,可以获得更好的寻优结果,所建立的标准形式粒子群算法(刘洪波等,2006)的粒子更新公式[式(13)]及权重策略[式(14)]如下: ...
无人操纵铲运机井下导航研究
1
2009
... 地下铲运机是无轨化开采的关键设备,因其具有高效、灵活和生产费用低等优点而得到广泛应用(张栋林,2002).智能化作业是未来矿山安全、高效、绿色生产的主要途径之一,地下铲运机的无人化可以大幅缩减井下作业人数(Shiroma et al.,2009).当前铲运机的路径精确跟踪问题是实现无人驾驶的难点.井下作业中,地下铲运机细长、低矮的铰接式车身具有大质量、大惯性和大转向延迟的运动特点,使得路径跟踪极为复杂.目前,国内外尚无完善的无人驾驶铲运机产品用于实际作业(郭鑫等,2009). ...
... 针对铰接式车辆的路径跟踪控制,Sasiadek et al.(2005)设计了一种分层结构模糊逻辑控制系统,借助自适应模糊控制器和模糊逻辑单元,铲运机可以获得相比传统控制算法更为平滑精准的控制效果.赵翾等(2015)使用Ackermann公式和指数趋近律设计了滑模变结构路径跟踪控制器,但其试验路径为曲率一致的正圆,且没有直行,无法验证其在井下巷道环境下的有效性.李建国等(2015)结合井下的特殊环境,将横向偏差和航向角偏差进行融合,提出了基于最优轨迹跟踪的PID控制策略,克服了单一误差反馈控制的局限.但PID控制器的参数整定较为繁琐,且当控制对象存在非线性、时变不确定性和强干扰等问题时,往往性能不佳(王勇,2000).Nayl et al.(2015)建立了基于模型预测控制(Model Predictive Control,MPC)的横向控制算法,但在路径跟踪过程中车速较慢.孟宇等(2018)应用遗传算法(Genetic Algorithm,GA)对线性二次型调节器(Linear Guadratic Regulator,LQR)权重矩阵进行参数优化求解,提出了基于预见位置信息的最优状态反馈控制器,实现了铰接式车辆的精准路径跟踪.罗维东等(2020)提出了基于非线性模型预测控制(Nonlinear Model Predictive Control,NMPC)的反应式导航系统和对应的分段式局部路径决策策略,实现了地下无人铲运机在复杂巷道环境下的自主导航. ...
粒子群优化算法的收敛性分析及其混沌改进算法
1
2006
... 粒子群算法(PSO)由生物学家Kennedy et al.(1995)提出,因具有参数较少、算法便于实现的优点和优良的优化性能而成为科研和工业应用领域的研究热点(方伟等,2010).Shi et al.(1998)将惯性权重引入了粒子群算法,再结合线性递减权重策略,可以获得更好的寻优结果,所建立的标准形式粒子群算法(刘洪波等,2006)的粒子更新公式[式(13)]及权重策略[式(14)]如下: ...
基于NMPC的地下无人铲运机反应式导航系统
1
2020
... 针对铰接式车辆的路径跟踪控制,Sasiadek et al.(2005)设计了一种分层结构模糊逻辑控制系统,借助自适应模糊控制器和模糊逻辑单元,铲运机可以获得相比传统控制算法更为平滑精准的控制效果.赵翾等(2015)使用Ackermann公式和指数趋近律设计了滑模变结构路径跟踪控制器,但其试验路径为曲率一致的正圆,且没有直行,无法验证其在井下巷道环境下的有效性.李建国等(2015)结合井下的特殊环境,将横向偏差和航向角偏差进行融合,提出了基于最优轨迹跟踪的PID控制策略,克服了单一误差反馈控制的局限.但PID控制器的参数整定较为繁琐,且当控制对象存在非线性、时变不确定性和强干扰等问题时,往往性能不佳(王勇,2000).Nayl et al.(2015)建立了基于模型预测控制(Model Predictive Control,MPC)的横向控制算法,但在路径跟踪过程中车速较慢.孟宇等(2018)应用遗传算法(Genetic Algorithm,GA)对线性二次型调节器(Linear Guadratic Regulator,LQR)权重矩阵进行参数优化求解,提出了基于预见位置信息的最优状态反馈控制器,实现了铰接式车辆的精准路径跟踪.罗维东等(2020)提出了基于非线性模型预测控制(Nonlinear Model Predictive Control,NMPC)的反应式导航系统和对应的分段式局部路径决策策略,实现了地下无人铲运机在复杂巷道环境下的自主导航. ...
基于预见位姿信息的铰接式车辆LQR-GA路径跟踪控制
1
2018
... 针对铰接式车辆的路径跟踪控制,Sasiadek et al.(2005)设计了一种分层结构模糊逻辑控制系统,借助自适应模糊控制器和模糊逻辑单元,铲运机可以获得相比传统控制算法更为平滑精准的控制效果.赵翾等(2015)使用Ackermann公式和指数趋近律设计了滑模变结构路径跟踪控制器,但其试验路径为曲率一致的正圆,且没有直行,无法验证其在井下巷道环境下的有效性.李建国等(2015)结合井下的特殊环境,将横向偏差和航向角偏差进行融合,提出了基于最优轨迹跟踪的PID控制策略,克服了单一误差反馈控制的局限.但PID控制器的参数整定较为繁琐,且当控制对象存在非线性、时变不确定性和强干扰等问题时,往往性能不佳(王勇,2000).Nayl et al.(2015)建立了基于模型预测控制(Model Predictive Control,MPC)的横向控制算法,但在路径跟踪过程中车速较慢.孟宇等(2018)应用遗传算法(Genetic Algorithm,GA)对线性二次型调节器(Linear Guadratic Regulator,LQR)权重矩阵进行参数优化求解,提出了基于预见位置信息的最优状态反馈控制器,实现了铰接式车辆的精准路径跟踪.罗维东等(2020)提出了基于非线性模型预测控制(Nonlinear Model Predictive Control,NMPC)的反应式导航系统和对应的分段式局部路径决策策略,实现了地下无人铲运机在复杂巷道环境下的自主导航. ...
非线性PID控制的研究
1
2000
... 针对铰接式车辆的路径跟踪控制,Sasiadek et al.(2005)设计了一种分层结构模糊逻辑控制系统,借助自适应模糊控制器和模糊逻辑单元,铲运机可以获得相比传统控制算法更为平滑精准的控制效果.赵翾等(2015)使用Ackermann公式和指数趋近律设计了滑模变结构路径跟踪控制器,但其试验路径为曲率一致的正圆,且没有直行,无法验证其在井下巷道环境下的有效性.李建国等(2015)结合井下的特殊环境,将横向偏差和航向角偏差进行融合,提出了基于最优轨迹跟踪的PID控制策略,克服了单一误差反馈控制的局限.但PID控制器的参数整定较为繁琐,且当控制对象存在非线性、时变不确定性和强干扰等问题时,往往性能不佳(王勇,2000).Nayl et al.(2015)建立了基于模型预测控制(Model Predictive Control,MPC)的横向控制算法,但在路径跟踪过程中车速较慢.孟宇等(2018)应用遗传算法(Genetic Algorithm,GA)对线性二次型调节器(Linear Guadratic Regulator,LQR)权重矩阵进行参数优化求解,提出了基于预见位置信息的最优状态反馈控制器,实现了铰接式车辆的精准路径跟踪.罗维东等(2020)提出了基于非线性模型预测控制(Nonlinear Model Predictive Control,NMPC)的反应式导航系统和对应的分段式局部路径决策策略,实现了地下无人铲运机在复杂巷道环境下的自主导航. ...
地下铲运机
1
2002
... 地下铲运机是无轨化开采的关键设备,因其具有高效、灵活和生产费用低等优点而得到广泛应用(张栋林,2002).智能化作业是未来矿山安全、高效、绿色生产的主要途径之一,地下铲运机的无人化可以大幅缩减井下作业人数(Shiroma et al.,2009).当前铲运机的路径精确跟踪问题是实现无人驾驶的难点.井下作业中,地下铲运机细长、低矮的铰接式车身具有大质量、大惯性和大转向延迟的运动特点,使得路径跟踪极为复杂.目前,国内外尚无完善的无人驾驶铲运机产品用于实际作业(郭鑫等,2009). ...
农用轮式铰接车辆滑模轨迹跟踪控制算法
2
2015
... 针对铰接式车辆的路径跟踪控制,Sasiadek et al.(2005)设计了一种分层结构模糊逻辑控制系统,借助自适应模糊控制器和模糊逻辑单元,铲运机可以获得相比传统控制算法更为平滑精准的控制效果.赵翾等(2015)使用Ackermann公式和指数趋近律设计了滑模变结构路径跟踪控制器,但其试验路径为曲率一致的正圆,且没有直行,无法验证其在井下巷道环境下的有效性.李建国等(2015)结合井下的特殊环境,将横向偏差和航向角偏差进行融合,提出了基于最优轨迹跟踪的PID控制策略,克服了单一误差反馈控制的局限.但PID控制器的参数整定较为繁琐,且当控制对象存在非线性、时变不确定性和强干扰等问题时,往往性能不佳(王勇,2000).Nayl et al.(2015)建立了基于模型预测控制(Model Predictive Control,MPC)的横向控制算法,但在路径跟踪过程中车速较慢.孟宇等(2018)应用遗传算法(Genetic Algorithm,GA)对线性二次型调节器(Linear Guadratic Regulator,LQR)权重矩阵进行参数优化求解,提出了基于预见位置信息的最优状态反馈控制器,实现了铰接式车辆的精准路径跟踪.罗维东等(2020)提出了基于非线性模型预测控制(Nonlinear Model Predictive Control,NMPC)的反应式导航系统和对应的分段式局部路径决策策略,实现了地下无人铲运机在复杂巷道环境下的自主导航. ...
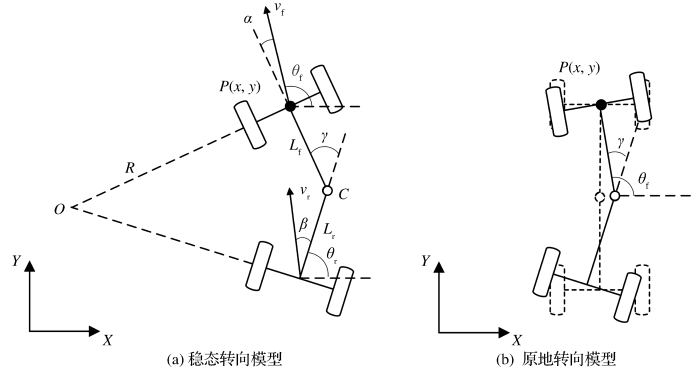
... 根据几何关系可得出地下铲运机的位姿状态(赵翾等,2015): ...
粒子群优化算法的改进及其应用研究
1
2016
... 粒子群优化算法(Particle Swarm Optimization,PSO)(Kennedy et al.,1995)是一种基于种群的随机优化算法,与GA等进化计算技术有一些类似(Kemmoé et al.,2009).但相较于其他算法,PSO具有易于实现、稳健性强、收敛特性稳定、全局搜索能力强以及动态性能好等特点(Gupta et al.,2014).PSO算法中粒子的种群趋同现象会导致搜索结果陷入局部最优或过早的收敛,无法从根本上确保搜索结果必然收敛于全局最优解(Van den Bergh,2001).为解决这一问题,Sun et al.(2004)提出了量子行为粒子群优化算法(Quantum-Behaved Particle Swarm Optimization,QPSO),通过增加粒子种群的随机性,提高了粒子种群的群体智能程度,有效地避免了优化结果过早收敛或陷入局部最优,在处理复杂的参数优化问题中更具优势(郑伟博,2016).本文应用QPSO算法对基于误差动力学模型的LQR路径跟踪控制器进行参数优化,实现了对地下铲运机精准稳定的路径跟踪控制,为地下铲运机无人驾驶提供了新的解决方案. ...
... 为了获得比较好的搜索能力和速度,种群规模N设置为50,迭代次数G设置为100(邹忱忱,2017);惯性权重w由0.9线性递减至0.4时,可以确保粒子群算法在初期具有较好的全局寻优能力,并且避免在迭代末期陷入局部最优(Shi et al.,1998);地下铲运机路径跟踪问题的优化过程中,对于粒子“个体认知”和“群体经验”没有相应的侧重点,可设定学习因子c1=c2=2;为兼顾搜索速度和精度,设置vmax=1,迭代时,粒子速度vi∈[-vmax,vmax];适当地给出粒子各元素的取值范围,可以在初始化粒子群后极大地缩短算法搜索最优值的时间,为了将初始种群的随机分布限制在适当范围内,令qmax=500;相比PSO算法,QPSO算法中唯一需要提前设置的参数仅有收缩—扩张系数α,与PSO算法中在惯性权重w的取值类似,将系数α设为固定值时,算法的优化性能有限,因此也可以用类似的线性递减策略设置系数α,其表达式为 ...





 甘公网安备 62010202000672号
甘公网安备 62010202000672号{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}