由于井下作业人员所处工作环境十分恶劣,日常作业强度大且重复性强,因此作业人员的工作效率难以有效提升,矿山产能受到严重制约。为解决这一问题,铲运机等大型矿山设备正朝着数字化、智能化和无人化的趋势发展[1 ] 。自主铲装作业作为其中一个重要的研究对象,面临诸多技术问题。虽然增强学习[2 ] 方法能够为自主铲装作业提供可行方案,但受限于算法,对铲装过程进行训练需要采集大量数据。若直接在真实环境中进行数据采集,则面临前期资金投入巨大、井下可变因素多及容易影响矿山正常生产作业等问题。现有技术下利用虚拟样机[3 ] 等仿真技术构建仿真作业平台,并在其中针对铲装作业进行数据收集,不仅可以节省设备改造成本,避免对现场作业造成干扰,而且通过调节模拟速度和环境因素,能够大大提高数据采集效率。
目前主要应用ADAMS、SolidWorks等软件结合MATLAB/Simulink环境对铲运机整车及工作装置进行建模与仿真。申焱华等[4 ] 利用ADAMS创建了铰接式车辆的机械系统模型。Yang等[5 ] 利用Simulink软件对铲运机液压转向系统的动态特性进行了仿真和讨论,结合SolidWorks和ADAMS/View环境建立了工作装置的可视化三维运动学/动力学模型[6 ] 。Gao等[7 ] 开发了铰接式车辆液压转向系统的12自由度模型。何邕等[8 ] 在虚拟环境实现了铲斗的自动放平功能,并提高了铲斗的平移性和举升油缸的传力比。邓崛等[9 ] 运用解析法对铲运机工作装置进行初步设计,结合RecurDyn进行运动学分析,建立了优化模型。姚宗伟[10 ] 利用虚拟样机和试验为佐证,建立了铰接式车辆侧翻动力学模型。Kwangseok等[11 ] 在MATLAB/Simulink环境下建立并验证了一个综合轮式装载机仿真模型,以提高铲运机的性能和能量流。Li等[12 ] 在重点关注整体建模的前提下,提出基于特征的铲运机工作装置系统建模方法。当前广泛使用机器人操作系统(简称ROS)作为软件开发平台,可以为自主铲装作业的进一步开发提供应用框架、开发环境和第三方应用扩展。但上述研究中涉及的部分软件与ROS的联合开发便捷性不足,因此需选用新的仿真环境。
本文选取V-REP作为与ROS联合开发的基础仿真试验平台,结合3D Studio Max中建立的铲运机和矿石贴图,在V-REP建立起具有动力学属性的井下铲运机、矿石爆堆及其工作环境模型,并通过外接设备控制模型进行井下铲运机作业过程的仿真和模拟。
1 铲运机三维建模
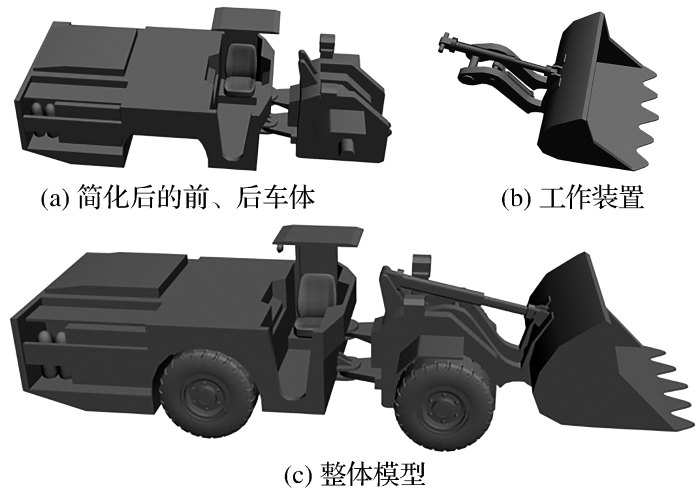
井下铲运机采用铰接式结构,其车身可简单视为由中间铰销连接的前、后两部分车体[13 ,14 ] 。前车体布置有铲斗工作装置,后车体则为整个车身提供动力源。铲运机依赖工作装置与矿石的相互作用来实现铲装运卸作业,其结构和性能直接影响着矿山企业的日常生产效率。因此,工作装置是铲运机建模的重要部分。不同工作场景下的铲斗结构不尽相同[15 ] ,但在工作过程中具有相似的工作状态,所以本文仅选取某型号正转四杆机构的井下铲运机进行仿真试验。
在V-REP中直接建立铲运机模型简单高效、通用性强,但由于提供的基础形状较为简单,无法很好地复现铲运机的工作过程。另一种方法是在3D Studio Max中建立贴图,然后在V-REP中逐步为模型添加物理属性[16 ] 。该方法能够保证铲运机模型形态足够逼真,可实现较好的仿真效果。为避免复杂模型在导入过程中出现未知错误,对模型进行如下简化处理[17 ] :
(1)保证铲运机外观效果,重点对铲斗及前、后车体进行建模;
(2)忽略动力系统、传动系统和制动系统部件及其他车体内部构件的设置;
经过处理后,井下铲运机的关键组件和完整模型如图1 所示。
图1
图1
井下铲运机模型
Fig.1
Underground LHD model
2 铲运机及其工作环境动力学建模
2.1 LHD建模过程
(1) LHD(铲运机,Load-haul-and-dump-machine)基本模型构造。本文选用基础模型来搭建铲运机的车体和铲斗的主要构造。铲斗工作装置包含由多块不规则多面体组合成的斗尖、斗侧和斗被3个部分,其整体结构和运动过程相对复杂,是建模过程中的重要部分。贴图导入V-REP后,根据车身轮廓对铲斗、动臂、前车体、后车体以及轮胎的结构模型进行组合,并添加前后车灯用于照明,各部件边界框参数设计如表1 所示。
(2) 添加关节。完成车身模型组合后,还需通过添加适当关节,为铲运机提供足够的自由度和运动特性。本文通过为轮胎和中间铰销添加旋转关节,实现车体的前进和转向功能。为实现铲斗正常工作,确保铲斗完成必要的翻转动作,还需采用移动关节给铲斗部分提供活塞收缩效果。
关节控制模式划分为扭矩/力模式和反向运动学模式。车身各关节中,轮胎关节和铰接关节采用扭矩/力模式,负责提供铲运机前进和转弯的动力。工作装置部分结构中,动臂前关节连接于铲斗与动臂之间,实现铲斗绕动臂旋转的动作;动臂后关节连接于动臂与前车体之间,实现动臂绕前车体旋转的动作,均采用扭矩/力模式。转斗油缸相关关节连接于铲斗与前车体之间,用于实现铲斗装料和卸料的动作,采用反向运动学模式。举升油缸相关关节连接于动臂与前车体之间,可实现铲斗提升和下降的动作,采用反向运动学模式。各关节参数设计如表2 所示。
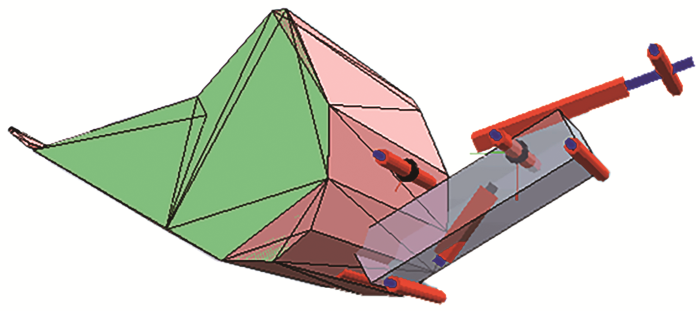
(3) 添加虚拟点(dummy)。为确保工作装置运动合理连贯,除了添加必要关节外,还需要在部分位置添加成对虚拟点。在铲运机的工作装置中,转斗油缸的往返运动实现了铲斗的翻转动作,实际建模处理时,铲斗与转斗油缸关节依靠转斗油缸前关节链接。转斗油缸前关节子层级与相同位置的铲斗子层级、举升油缸前关节子层级与相同位置的动臂子层级下,分别添加2组成对虚拟点,保证举升油缸关节收缩时其前关节与动臂相对位置不变。添加好关节和虚拟点后的井下铲运机工作装置如图2 所示。
图2
图2
具备完整功能的井下铲运机工作装置结构示意图
Fig.2
Schematic diagram of underground LHD working device with complete function
(4) 设置物理特性。为使铲运机模型具备相应的物理特性,还需为构建模型的基础形状和关节添加碰撞和动力学属性。在设置基础形状的碰撞属性时,需调整对象间碰撞和环境碰撞2项参数,且每项参数均由8位组成。一般情况下环境碰撞8位参数均设置为1,保证模型与环境的完整交互。在设置对象间碰撞参数时,只有对象间部分交集不为0,才能发生相互碰撞。经过反复试验,井下铲运机基本形状部分动力学参数设置如表3 所示。
在关节的动力学属性设置中,用户可以设置是否启用关节电机和控制回路。本文控制回路选用V-REP内自带的PID控制器调节铰接关节和动臂前后关节。PID控制器被广泛应用于工业过程控制[18 ] ,通过改变比例系数、积分系数和微分系数即可调整关节位置。由于V-REP中不支持直接输出位置环,因此换算为速度环。关节某时刻的速度V 可表示为
V = K p e i + K i ∑ e i Δ t + K d e i - e i - 1 / Δ t Δ t (1)
式中:K p K i K d Δ t e i i 时刻,实际位置与期望位置之间的误差量。经过多次试验,将铰接关节和动臂前关节的控制上限速度设置为360°/s,动臂后关节控制上限速度设置为100°/s。动臂后关节连接着整个动臂和铲斗部分,为了保持工作装置的稳定性,需要降低动臂后关节的控制上限速度。本文进行参数调整时,仅调节比例系数和积分系数,即能满足试验控制要求。
在动力学属性设置中,电机为关节提供一定的扭矩和力。除转斗油缸和举升油缸相关关节因本身不连接荷载而关闭电机模式之外,其余关节均设置为开启。经过多次试验,将井下铲运机4个轮胎力矩设置为1×106 N·m,将前后车体处的铰接关节力矩设置为1×106 N·m,将动臂前后关节的力矩分别设置为5×109 N·m和1×109 N·m。经过反复试验,铲运机关节部分动力学参数设置如表4 所示。
(5) 定义模型层次结构。V-REP可以通过将场景层次结构中的对象拖放到另一个对象上,以创建模型各部件的父子层级关系。导入至V-REP场景中的模型共有3类:第一类是构成车体、轮胎和力臂部分的基本形状;第二类是为铲运机提供动力/扭矩的关节;第三类是美化模型的贴图。以后轮关节的层级结构为例,将旋转关节设置为父层级,具备动力学属性的圆柱体结构为子层级,轮胎贴图模型则作为圆柱体的子层级。
本文选择后车体作为模型的根父级,其子层级为后轮关节和转向铰接关节。前车体为铰接关节的子层级,将前轮关节、动臂前关节和前车体贴图设置为前车体的子层级。动臂前关节的子层级为工作装置上的其他关节,最终子层级传递到铲斗部分。前车体贴图的子层级也涉及工作装置运动的诸多关节。铲运机模型在设置好层次结构后,已具有一定的质量和惯性,可与虚拟仿真环境中的对象发生碰撞反应。观察铲运机工作流程时,可根据不同展示要求选择是否保留贴图部分,如图3 所示。
图3
图3
隐藏和展示贴图的井下铲运机模型
Fig.3
Underground LHD model with hidden and displayed texture
2.2 矿石爆堆与工作环境动力学建模过程
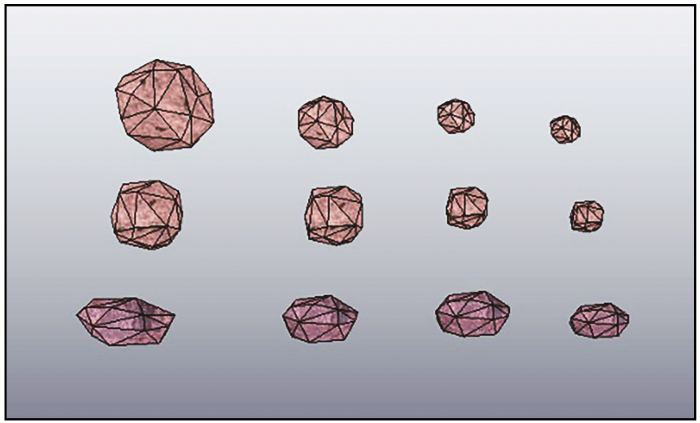
(1) 矿石堆建模。受限于仿真速度,本文并没有随机生成矿石模型,而是在建模时通过对象空间修改器对3D Studio Max建立的规则多面体进行任意修改。当得到3种不规则多面体后,搭配矿石贴图导入V-REP,并将其尺寸减小3次,每次减少10%,最终生成如图4 所示的12种基础矿石模型。此外,矿石模型必须正确设置碰撞属性,以确保矿石与矿石、矿石与铲运机及周围环境之间的正确交互。
图4
图4
基础矿石模型
Fig.4
Basic ore model
(2) 采矿工作环境建模。本文旨在模拟铲运机在出矿点铲装矿石,并经由运输巷道运输至溜井的过程,因此仅构建运输巷道、出矿点和溜井等相关模型,忽略相对复杂的井下配套设施。
对运输巷道进行建模时,需在其两端分别设置进路作为出矿点和溜井。同时为便于观察铲运机模型的实时动态,所有巷道均不封顶,并做半透明化处理。在V-REP内,墙体均由长方体面片组合而成,均可与铲运机发生碰撞反应。出矿点模拟真实矿山的断面采场,铲运机可由进路直达出矿点。本文通过手柄控制矿石下落形成矿石堆,为防止矿石随意滚动而不易成堆,还需在矿石堆后设置隔板。
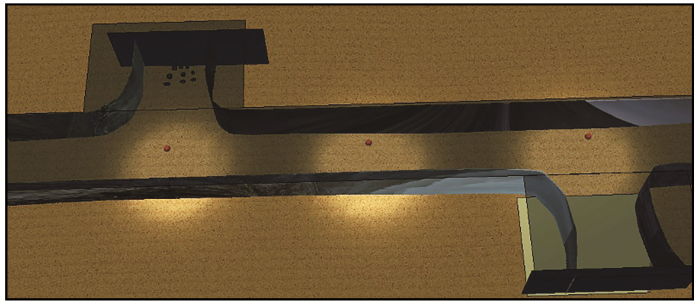
溜井的作用是将阶段爆破的矿石运输至下部阶段集中装车。建模时,在巷道另一端设置进路和隔板作为溜井出矿点。为贴近井下环境,选择V-REP模型库中的地面模型作为巷道地面,并调节地面大小、局部高程和纹理显示等相关参数。同时,为模拟井下光照条件,删除V-REP中的自带光源,在巷道顶部依次添加3个聚光灯作为照明设施,构建完成的采矿工作环境(巷道模型)如图5 所示。
图5
图5
巷道模型
Fig.5
Roadway model
2.3 模型展示
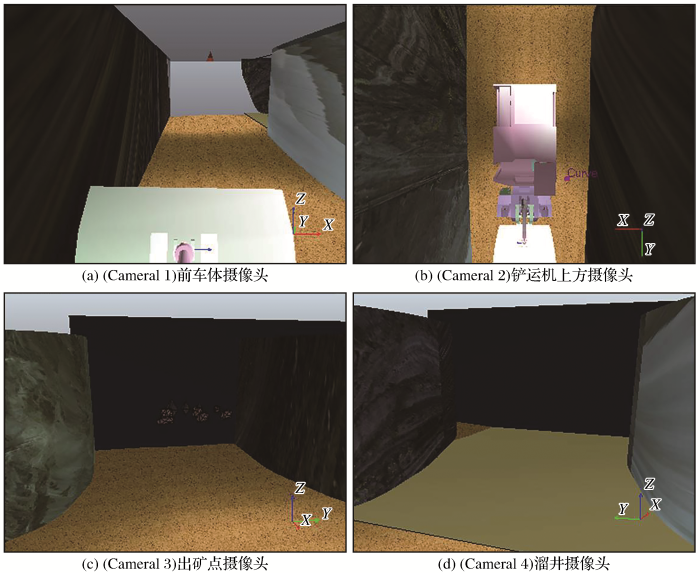
将铲运机、基础矿石和采矿工作环境等模型全部导入至V-REP的同一场景中。为方便多角度观察车辆工作状态,还在铲运机前车体、正上方、出矿点和溜井处工作场景中添加4台摄像机,用于观察路况和作业状态,如图6 所示。
图6
图6
井下铲运机模型及其工作环境模型实时显示
Fig.6
Underground LHD model and its working environment model
3 铲运机及其工作环境控制系统构建
本文使用V-REP中默认的Lua语言编写控制脚本操纵铲运机及其工作环境的一系列仿真动作,Lua语言小巧高效,可以提供灵活的扩展和定制功能[19 ] 。同时使用游戏手柄作为外接控制设备,编写控制插件同V-REP进行数据传输。
3.1 外接手柄控制
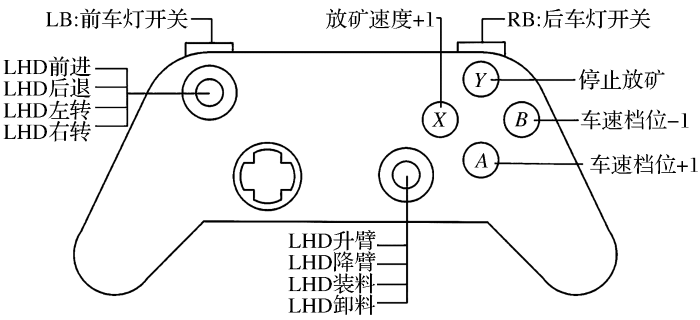
外接手柄配备有多个单独按键,并支持双摇杆模式。其中用左摇杆控制铲运机行走,用右摇杆控制铲运机工作装置相关姿态,用其他按键调整铲运机速度和放矿速度。结合井下作业实际情况,模型除基本转向、行进和照明功能之外,还设置5挡速度档位。同时手柄还设置了具有0~10挡的放矿控制开关,实现不同速度下矿石爆堆的生成状态,手柄控制键位如图7 所示。
图7
图7
手柄控制键位示意图
Fig.7
Schematic diagram of control key
3.2 LHD转向控制系统设计
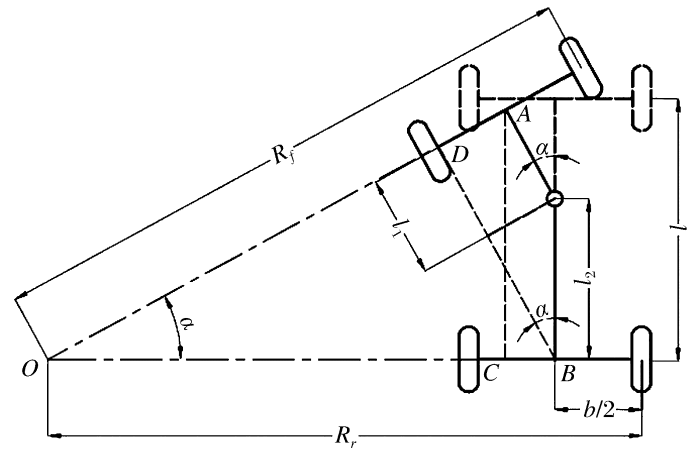
作为铰接式车辆,铲运机通过前、后车架绕中间铰销的相对转动来实现,因此两侧车轮转动平面始终保持相对平行[20 ] 。过前后车轴线做底面的垂面,这2个平面的交线即为转动轴线,该轴线在水平面的投影点为O,铲运机绕此线作无滑动的纯滚动。为保证转向仿真过程中车体的稳定性,应为内外两侧车轮配置不同转速。
如图8 所示,铲运机模型轴距为l ,轮距为b 。点O 为铲运机的瞬时转向中心,α 为铲运机铰接转向角。铲运机在转向时,前桥中心点A 会绕中央铰接点旋转。此时外侧前轮的转向半径为Rf ,计算过程如下:
R f = b 2 + A O (2)
A O = A C s i n α (3)
A C = l 1 · c o s α + l 2 (4)
R f = b 2 + l 1 · c o s α + l 2 s i n α (5)
图8
图8
铰接转向示意图
Fig.8
Articulated steering diagram
R f 1 = l 1 · c o s α + l 2 s i n α - b 2 (6)
R r = b 2 + B O (7)
B O = B D s i n α (8)
B D = l 1 + l 2 · c o s α (9)
R r = b 2 + l 1 + l 2 · c o s α s i n α (10)
R r 1 = l 1 + l 2 · c o s α s i n α - b 2 (11)
当转弯角度小于10°时,默认井下铲运机四轮速度保持一致,不发生变化;当转弯角度大于10°时,根据假设可推导出后轮轴线中心点的角速度为
ω = V r B O (12)
此时,内侧和外侧2个后轮的速度分别为Vr 1 、Vr 2 ,分别表示为
V r 1 = R r 1 ⋅ ω = V r ∙ [ 1 - b s i n α r 2 ( l 1 + l 2 · c o s α ) ] (13)
V r 2 = R r 2 ⋅ ω = V r ∙ [ 1 + b · s i n α r 2 ( l 1 + l 2 · c o s α ) ] (14)
在转向瞬间,假设前、后轮角速度近似相等,因此内侧和外侧2个前轮的速度分别为Vf 1 ,Vf 2, 表达式如下:
V f 1 = R f 1 ⋅ ω = V r ∙ 2 l 1 · c o s α + 2 l 2 - b · s i n α 2 ( l 1 + l 2 · c o s α ) (15)
V f 2 = R f 2 ⋅ ω = V r ∙ 2 l 1 · c o s α + 2 l 2 + b · s i n α 2 ( l 1 + l 2 · c o s α ) (16)
通过上述公式均可求出四轮速度,从而避免了因四轮同速导致铲运机仿真时出现失稳现象。在V-REP中还可为轮胎设置不同速度来实现变速箱的相应功能,从而满足各种工况对铲运机牵引力和速度的要求[21 ] 。
3.3 矿石堆控制系统
本文设置出矿点正上方4 m处作为矿石产生的初始点,矿石模型生成后在重力作用下矿石会下落并堆积成堆。通过在指定位置添加虚拟点并经由内置函数获取其坐标后,可以在模拟场景中固定矿石的具体下落点。其后读取12种初始矿石模型,并在每次循环按一定间距随机复制其中10种生成矿石。这是由于矿石模型具有碰撞模型,复制的矿石模型与原矿石坐标重合时,便会瞬间炸开影响成堆效果。同时,为保证矿石生成速度的可控性,还设置了计时器通过增加循环次数减慢矿石生成。在V-REP的同一场景中,同时控制铲运机和矿石堆涉及多个线程,为保证仿真实时性,待矿石模块生成完毕后,脚本会自动切换至铲运机控制模块。
3.4 模型效果
(1) 铲装过程。完成建模和脚本编写,即可操纵铲运机模型在仿真环境中模拟真实作业过程。铲运机的工作装置一般涉及5种工况[22 ] ,即插入工况、铲装工况、满载运输工况、卸载工况和空载运输工况。本文将这5种工况总结为铲装过程、运输过程和卸载过程。铲装作业包含插入工况和铲装工况,由于需要实时控制,且铲斗与矿石模型接触时存在大量碰撞计算,该过程显得极为重要。
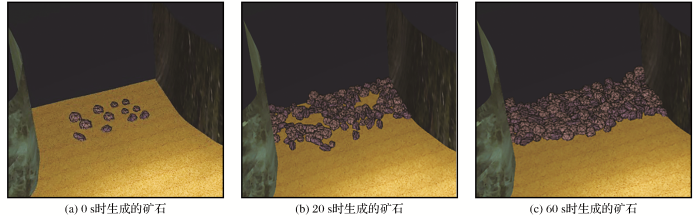
开始铲装作业前,需通过手柄控制开关生成适量矿石。矿石量增多时会增加碰撞计算量,减缓仿真速度。为保证仿真速度,经过多次试验,将需矿石生成档位设置为5,一定时间后生成的矿石堆如图9 所示。
图9
图9
不同时间段生成的矿石情况(档位为5)
Fig.9
Ore formation at different time intervals under the condition of 5
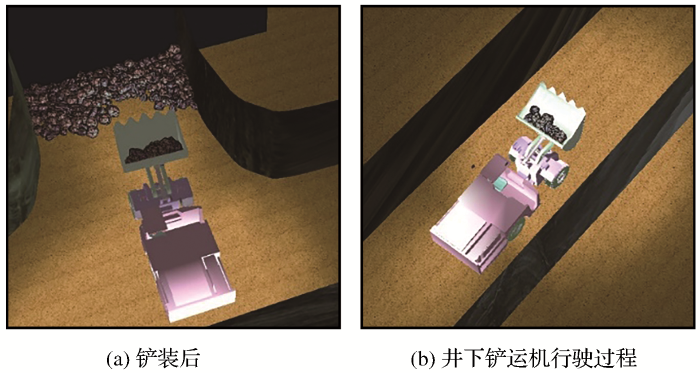
其后操控铲运机以2挡速度沿巷道行至出矿点。巷道较为狭窄,需在出矿点处多次调整姿态才可驶入。此时,矿石成堆分布较为集中。铲装作业时,铲运机将铲斗放置于地面,斗尖触地,斗底板与地面呈3°~5°倾角,铲斗借助铲运机的牵引力插入矿石堆。再通过转动铲斗铲取矿石,待铲斗口翻至接近水平,即可完成一次铲装。如图10 (a)所示。可以发现铲装作业完成后,矿堆上方矿石自然下落补全空白,使矿石堆达到平衡状态,符合现实世界中矿石堆的形态。
图10
图10
井下铲运机铲装和行驶过程
Fig.10
Scooping operation and driving process of underground LHD
(2) 运输过程。由于巷道狭窄,铲运机在完成铲装作业后不能直接原地转向,而是将车尾朝向运输巷道行驶方向的反方向,使车身处在巷道中,然后通过调整车头方向直行驶进运输巷道。在重载运输状态下,铲斗斗口朝上,且举升动臂,保持斗内矿石平稳。操控过程中,铲运机行驶平稳,如图10 (b)所示。
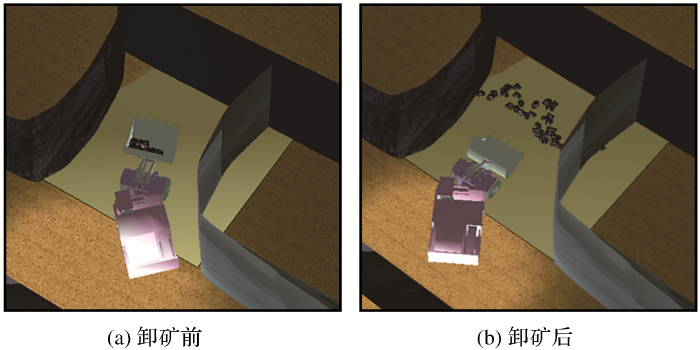
(3) 卸矿过程。操控铲运机以2挡速度行驶至溜井处,准备进行卸矿操作,卸矿前的状态如图11 (a)所示。在卸载点处,举升动臂下降一定高度,接着翻转铲斗,使铲斗中的矿石在重力作用下卸出,堆积在卸载点。如图11 (b)所示,铲斗在卸矿完成后重新向上翻转至运输位置,从而完成整个铲装运卸过程。
图11
图11
卸矿过程
Fig.11
Unloading process
通过编写脚本并添加附加传感器,对铲运机各关节坐标变化、运动学参数和受力情况进行实时采集,可用于铲运机行驶轨迹、工作装置动作参数的描述,为铲运机自主铲装作业的行为训练提供充足的数据。
4 结论
本文以某型号正转四杆结构井下铲运机为参考,在3D Studio Max中建立了井下铲运机和矿石模型的贴图,并在仿真试验平台V-REP内建立了其三维动力学模型。以此为基础,编写脚本生成矿石堆,通过外接设备控制矿石堆生成开关和生成速度。同时在VREP搭建了包括运输巷道、出矿点和溜井等在内具有碰撞属性的采矿环境,将铲运机、矿石堆与环境有机结合。实现外接遥控设备与仿真试验平台的实时通信,通过外接遥控设备操控井下铲运机自主行走及其工作装置的姿态变化。实现对真实环境下铲运机铲装运卸作业的真实模拟,满足对自主铲装作业强化学习训练以及从业人员先期作业培训的要求。
参考文献
View Option
[1]
王亚东 ,田立勇 ,李胜 ,等 一种井下铲运机无线遥控系统
[J]. 金属矿山 ,2018 ,47 (3 ):142 -145 .
[本文引用: 1]
Wang Yadong Tian Liyong Li Sheng et al A wireless remote control system of underground scraper
[J].Metal Mine ,2018 ,47 (3 ):142 -145 .
[本文引用: 1]
[2]
Siddharth D Fredrik S Ulf B et al Field test of neural-network based automatic bucket-filling algorithm for wheel-loaders
[J]. Automation in Construction ,2019 ,97 :1 -12 .
[本文引用: 1]
[3]
赵志平 ,李新勇 虚拟样机技术及其应用和发展
[J]. 机械研究与应用 ,2006 ,19 (1 ):6 -7 .
[本文引用: 1]
Zhao Zhiping Li Xinyong Application and development of virtual prototyping
[J]. Mechanical Research and Application ,2006 ,19 (1 ):6 -7 .
[本文引用: 1]
[4]
申焱华 ,韩丽 ,金纯 铰接式电动轮原地转向动力学联合仿真分析
[J].系统仿真学报 ,2013 ,25 (7 ):1691 -1695 .
[本文引用: 1]
Shen Yanhua Han Li Jin Chun Co-simulation analysis of in-situ steering dynamics of articulated motor-driven vehicle
[J]. Journal of System Simulation ,2013 ,25 (7 ):1691 -1695 .
[本文引用: 1]
[5]
Yang Z J He Q H Liu B Dynamic characteristics of hydraulic power steering system with accumulator in load-haul-dump vehicle
[J]. Journal of Central South University of Technology(English Edition) ,2004 ,4 (11 ):451 -456 .
[本文引用: 1]
[6]
杨忠炯 地下铲运机多体系统虚拟样机建模及系统动态特性仿真研究
[D].长沙 :中南大学 ,2007 .
[本文引用: 1]
Yang Zhongjiong Simulation Research on Virtual Prototype Modeling and Dynamic Characteristics of Multi-systems of Underground Load Dump Haul Vehicle
[D].Changsha :Central South University ,2007 .
[本文引用: 1]
[7]
Gao Y Shen Y H Jin C Analysis of handling stability for electric-driven articulated truck based on co-simulation
[C]//International Conference on Mechatronics and Control .New York :IEEE ,2014 :738 -743 .
[本文引用: 1]
[8]
何邕 ,贾美薇 ,李萍奎 ,等 基于虚拟样机的铲运机工作装置仿真及优化
[J].系统仿真学报 ,2011 ,23 (4 ):702 -706 .
[本文引用: 1]
He Yong Jia Meiwei Li Pingkui et al Simulation and optimization for work mechanism of load haul dump based on virtual prototype
[J].Journal of System Simulation ,2011 ,23 (4 ):702 -706 .
[本文引用: 1]
[9]
邓崛 ,黄晓元 ,何文波 ,等 基于虚拟样机的铲运机工作装置优化设计
[J]. 机械设计与研究 ,2008 ,24 (6 ):113 -116 .
[本文引用: 1]
Deng Jue Huang Xiaoyuan He Wenbo et al Optimum design of LHD working device based on virtual prototype
[J]. Machine Design and Research ,2008 ,24 (6 ):113 -116 .
[本文引用: 1]
[10]
姚宗伟 铰接转向工程车辆侧倾稳定性研究
[D]. 长春 :吉林大学 ,2013 .
[本文引用: 1]
Yao Zongwei Study on the Rollover Stability of Articulated Steer Engineering Vehicle
[D].Changchun :Jilin University ,2013 .
[本文引用: 1]
[11]
Kwangseok O Hakgu K Kyungeun K et al Integrated wheel loader simulation model for improving performance and energy flow
[J]. Automation In Construction ,2015 ,58 :129 -143 .
[本文引用: 1]
[12]
Li Y Fang M Feng M L et al Three dimensional modeling of the working linkage of load-haul-dump loader
[J]. The International Journal of Advanced Manufacturing Technology ,2007 ,32 (9/10 ):856 -862 .
[本文引用: 1]
[13]
窦凤谦 地下矿用铰接车路径跟踪与智能避障控制研究
[D]. 北京 :北京科技大学 ,2018 .
[本文引用: 1]
Dou Fengqian Research on Path Tracking and Obstacles Avoidance for Autonomous Underground Mining Articulated Vehicles
[D].Beijing :University of Science and Technology Beijing ,2018 .
[本文引用: 1]
[14]
高海峰 矿用铲运机前后机架的优化设计
[D].太原 :太原理工大学 ,2012 .
[本文引用: 1]
Gao Haifeng The Optimal Design on Front Frame and Back Frame for Mine-used Forklift
[D].Taiyuan :Taiyuan University of Technology ,2012 .
[本文引用: 1]
[15]
石刚 铲运机工作装置的设计
[J]. 矿山机械 ,2005 ,33 (3 ):11 -13 .
[本文引用: 1]
Shi Gang Design of LHD working device
[J]. Mining and Processing Equipment ,2005 ,33 (3 ):11 -13 .
[本文引用: 1]
[16]
段化鹏 虚拟现实中物理引擎关键技术的研究与应用
[D]. 青岛 :山东科技大学 ,2010 .
[本文引用: 1]
Duan Huapeng Research and Application of Physics Engine Key Techniques in Virtual Reality
[D].Qingdao :Shandong University of Science and Technology ,2010 .
[本文引用: 1]
[17]
翟晓男 基于虚拟样机技术的地下铲运机稳定性研究
[D]. 北京 :北京邮电大学 ,2015 .
[本文引用: 1]
Zhai Xiaonan Study on the Stability of the Underground Lhd Based on Virtual Protype Technology
[D].Beijing :Beijing University of Posts and Telecommunications ,2015 .
[本文引用: 1]
[18]
陶永华 新型PID控制及其应用——第一讲PID控制原理和自整定策略
[J]. 工业仪表与自动化装置 ,1997 (4 ):60 -64 .
[本文引用: 1]
Tao Yonghua New PID control and its application —Lecture 1 PID control principle and self-tuning strategy
[J]. Industrial Instrumentation and Automation ,1997 (4 ):60 -64 .
[本文引用: 1]
[19]
王磊 浅析游戏脚本语言Lua
[J]. 电脑知识与技术 ,2010 ,6 (4 ):889 -901 .
[本文引用: 1]
Wang Lei The game scripting language Lua
[J]. Computer Knowledge and Technology ,2010 ,6 (4 ):889 -901 .
[本文引用: 1]
[20]
杨占敏 ,王智明 ,张春秋 轮式装载机
[M]. 北京 :化学工业出版社 ,2005 .
[本文引用: 1]
Yang Zhanmin Wang Zhiming Zhang Chunqiu Wheel Loader
[M].Beijing :Chemical Industry Press ,2005 .
[本文引用: 1]
[21]
赵强 ,谢峰 ,余天明 汽车自动变速箱的发展现状及其技术趋势
[J]. 机械 ,2010 ,37 (12 ):1 -5 .
[本文引用: 1]
Zhao Qiang Xie Feng Yu Tianming Developmental status and technical direction of automatic transmission of motor vehicles machinery
[J].Machinery ,2010 ,37 (12 ):1 -5 .
[本文引用: 1]
[22]
张栋林 地下铲运机
[M]. 北京 :冶金工业出版社 ,2002 .
[本文引用: 1]
Zhang Donglin Underground LHD
[M].Beijing :Metallurgical Industry Press ,2002 .
[本文引用: 1]
一种井下铲运机无线遥控系统
1
2018
... 由于井下作业人员所处工作环境十分恶劣,日常作业强度大且重复性强,因此作业人员的工作效率难以有效提升,矿山产能受到严重制约.为解决这一问题,铲运机等大型矿山设备正朝着数字化、智能化和无人化的趋势发展[1 ] .自主铲装作业作为其中一个重要的研究对象,面临诸多技术问题.虽然增强学习[2 ] 方法能够为自主铲装作业提供可行方案,但受限于算法,对铲装过程进行训练需要采集大量数据.若直接在真实环境中进行数据采集,则面临前期资金投入巨大、井下可变因素多及容易影响矿山正常生产作业等问题.现有技术下利用虚拟样机[3 ] 等仿真技术构建仿真作业平台,并在其中针对铲装作业进行数据收集,不仅可以节省设备改造成本,避免对现场作业造成干扰,而且通过调节模拟速度和环境因素,能够大大提高数据采集效率. ...
一种井下铲运机无线遥控系统
1
2018
... 由于井下作业人员所处工作环境十分恶劣,日常作业强度大且重复性强,因此作业人员的工作效率难以有效提升,矿山产能受到严重制约.为解决这一问题,铲运机等大型矿山设备正朝着数字化、智能化和无人化的趋势发展[1 ] .自主铲装作业作为其中一个重要的研究对象,面临诸多技术问题.虽然增强学习[2 ] 方法能够为自主铲装作业提供可行方案,但受限于算法,对铲装过程进行训练需要采集大量数据.若直接在真实环境中进行数据采集,则面临前期资金投入巨大、井下可变因素多及容易影响矿山正常生产作业等问题.现有技术下利用虚拟样机[3 ] 等仿真技术构建仿真作业平台,并在其中针对铲装作业进行数据收集,不仅可以节省设备改造成本,避免对现场作业造成干扰,而且通过调节模拟速度和环境因素,能够大大提高数据采集效率. ...
Field test of neural-network based automatic bucket-filling algorithm for wheel-loaders
1
2019
... 由于井下作业人员所处工作环境十分恶劣,日常作业强度大且重复性强,因此作业人员的工作效率难以有效提升,矿山产能受到严重制约.为解决这一问题,铲运机等大型矿山设备正朝着数字化、智能化和无人化的趋势发展[1 ] .自主铲装作业作为其中一个重要的研究对象,面临诸多技术问题.虽然增强学习[2 ] 方法能够为自主铲装作业提供可行方案,但受限于算法,对铲装过程进行训练需要采集大量数据.若直接在真实环境中进行数据采集,则面临前期资金投入巨大、井下可变因素多及容易影响矿山正常生产作业等问题.现有技术下利用虚拟样机[3 ] 等仿真技术构建仿真作业平台,并在其中针对铲装作业进行数据收集,不仅可以节省设备改造成本,避免对现场作业造成干扰,而且通过调节模拟速度和环境因素,能够大大提高数据采集效率. ...
虚拟样机技术及其应用和发展
1
2006
... 由于井下作业人员所处工作环境十分恶劣,日常作业强度大且重复性强,因此作业人员的工作效率难以有效提升,矿山产能受到严重制约.为解决这一问题,铲运机等大型矿山设备正朝着数字化、智能化和无人化的趋势发展[1 ] .自主铲装作业作为其中一个重要的研究对象,面临诸多技术问题.虽然增强学习[2 ] 方法能够为自主铲装作业提供可行方案,但受限于算法,对铲装过程进行训练需要采集大量数据.若直接在真实环境中进行数据采集,则面临前期资金投入巨大、井下可变因素多及容易影响矿山正常生产作业等问题.现有技术下利用虚拟样机[3 ] 等仿真技术构建仿真作业平台,并在其中针对铲装作业进行数据收集,不仅可以节省设备改造成本,避免对现场作业造成干扰,而且通过调节模拟速度和环境因素,能够大大提高数据采集效率. ...
虚拟样机技术及其应用和发展
1
2006
... 由于井下作业人员所处工作环境十分恶劣,日常作业强度大且重复性强,因此作业人员的工作效率难以有效提升,矿山产能受到严重制约.为解决这一问题,铲运机等大型矿山设备正朝着数字化、智能化和无人化的趋势发展[1 ] .自主铲装作业作为其中一个重要的研究对象,面临诸多技术问题.虽然增强学习[2 ] 方法能够为自主铲装作业提供可行方案,但受限于算法,对铲装过程进行训练需要采集大量数据.若直接在真实环境中进行数据采集,则面临前期资金投入巨大、井下可变因素多及容易影响矿山正常生产作业等问题.现有技术下利用虚拟样机[3 ] 等仿真技术构建仿真作业平台,并在其中针对铲装作业进行数据收集,不仅可以节省设备改造成本,避免对现场作业造成干扰,而且通过调节模拟速度和环境因素,能够大大提高数据采集效率. ...
铰接式电动轮原地转向动力学联合仿真分析
1
2013
... 目前主要应用ADAMS、SolidWorks等软件结合MATLAB/Simulink环境对铲运机整车及工作装置进行建模与仿真.申焱华等[4 ] 利用ADAMS创建了铰接式车辆的机械系统模型.Yang等[5 ] 利用Simulink软件对铲运机液压转向系统的动态特性进行了仿真和讨论,结合SolidWorks和ADAMS/View环境建立了工作装置的可视化三维运动学/动力学模型[6 ] .Gao等[7 ] 开发了铰接式车辆液压转向系统的12自由度模型.何邕等[8 ] 在虚拟环境实现了铲斗的自动放平功能,并提高了铲斗的平移性和举升油缸的传力比.邓崛等[9 ] 运用解析法对铲运机工作装置进行初步设计,结合RecurDyn进行运动学分析,建立了优化模型.姚宗伟[10 ] 利用虚拟样机和试验为佐证,建立了铰接式车辆侧翻动力学模型.Kwangseok等[11 ] 在MATLAB/Simulink环境下建立并验证了一个综合轮式装载机仿真模型,以提高铲运机的性能和能量流.Li等[12 ] 在重点关注整体建模的前提下,提出基于特征的铲运机工作装置系统建模方法.当前广泛使用机器人操作系统(简称ROS)作为软件开发平台,可以为自主铲装作业的进一步开发提供应用框架、开发环境和第三方应用扩展.但上述研究中涉及的部分软件与ROS的联合开发便捷性不足,因此需选用新的仿真环境. ...
铰接式电动轮原地转向动力学联合仿真分析
1
2013
... 目前主要应用ADAMS、SolidWorks等软件结合MATLAB/Simulink环境对铲运机整车及工作装置进行建模与仿真.申焱华等[4 ] 利用ADAMS创建了铰接式车辆的机械系统模型.Yang等[5 ] 利用Simulink软件对铲运机液压转向系统的动态特性进行了仿真和讨论,结合SolidWorks和ADAMS/View环境建立了工作装置的可视化三维运动学/动力学模型[6 ] .Gao等[7 ] 开发了铰接式车辆液压转向系统的12自由度模型.何邕等[8 ] 在虚拟环境实现了铲斗的自动放平功能,并提高了铲斗的平移性和举升油缸的传力比.邓崛等[9 ] 运用解析法对铲运机工作装置进行初步设计,结合RecurDyn进行运动学分析,建立了优化模型.姚宗伟[10 ] 利用虚拟样机和试验为佐证,建立了铰接式车辆侧翻动力学模型.Kwangseok等[11 ] 在MATLAB/Simulink环境下建立并验证了一个综合轮式装载机仿真模型,以提高铲运机的性能和能量流.Li等[12 ] 在重点关注整体建模的前提下,提出基于特征的铲运机工作装置系统建模方法.当前广泛使用机器人操作系统(简称ROS)作为软件开发平台,可以为自主铲装作业的进一步开发提供应用框架、开发环境和第三方应用扩展.但上述研究中涉及的部分软件与ROS的联合开发便捷性不足,因此需选用新的仿真环境. ...
Dynamic characteristics of hydraulic power steering system with accumulator in load-haul-dump vehicle
1
2004
... 目前主要应用ADAMS、SolidWorks等软件结合MATLAB/Simulink环境对铲运机整车及工作装置进行建模与仿真.申焱华等[4 ] 利用ADAMS创建了铰接式车辆的机械系统模型.Yang等[5 ] 利用Simulink软件对铲运机液压转向系统的动态特性进行了仿真和讨论,结合SolidWorks和ADAMS/View环境建立了工作装置的可视化三维运动学/动力学模型[6 ] .Gao等[7 ] 开发了铰接式车辆液压转向系统的12自由度模型.何邕等[8 ] 在虚拟环境实现了铲斗的自动放平功能,并提高了铲斗的平移性和举升油缸的传力比.邓崛等[9 ] 运用解析法对铲运机工作装置进行初步设计,结合RecurDyn进行运动学分析,建立了优化模型.姚宗伟[10 ] 利用虚拟样机和试验为佐证,建立了铰接式车辆侧翻动力学模型.Kwangseok等[11 ] 在MATLAB/Simulink环境下建立并验证了一个综合轮式装载机仿真模型,以提高铲运机的性能和能量流.Li等[12 ] 在重点关注整体建模的前提下,提出基于特征的铲运机工作装置系统建模方法.当前广泛使用机器人操作系统(简称ROS)作为软件开发平台,可以为自主铲装作业的进一步开发提供应用框架、开发环境和第三方应用扩展.但上述研究中涉及的部分软件与ROS的联合开发便捷性不足,因此需选用新的仿真环境. ...
地下铲运机多体系统虚拟样机建模及系统动态特性仿真研究
1
2007
... 目前主要应用ADAMS、SolidWorks等软件结合MATLAB/Simulink环境对铲运机整车及工作装置进行建模与仿真.申焱华等[4 ] 利用ADAMS创建了铰接式车辆的机械系统模型.Yang等[5 ] 利用Simulink软件对铲运机液压转向系统的动态特性进行了仿真和讨论,结合SolidWorks和ADAMS/View环境建立了工作装置的可视化三维运动学/动力学模型[6 ] .Gao等[7 ] 开发了铰接式车辆液压转向系统的12自由度模型.何邕等[8 ] 在虚拟环境实现了铲斗的自动放平功能,并提高了铲斗的平移性和举升油缸的传力比.邓崛等[9 ] 运用解析法对铲运机工作装置进行初步设计,结合RecurDyn进行运动学分析,建立了优化模型.姚宗伟[10 ] 利用虚拟样机和试验为佐证,建立了铰接式车辆侧翻动力学模型.Kwangseok等[11 ] 在MATLAB/Simulink环境下建立并验证了一个综合轮式装载机仿真模型,以提高铲运机的性能和能量流.Li等[12 ] 在重点关注整体建模的前提下,提出基于特征的铲运机工作装置系统建模方法.当前广泛使用机器人操作系统(简称ROS)作为软件开发平台,可以为自主铲装作业的进一步开发提供应用框架、开发环境和第三方应用扩展.但上述研究中涉及的部分软件与ROS的联合开发便捷性不足,因此需选用新的仿真环境. ...
地下铲运机多体系统虚拟样机建模及系统动态特性仿真研究
1
2007
... 目前主要应用ADAMS、SolidWorks等软件结合MATLAB/Simulink环境对铲运机整车及工作装置进行建模与仿真.申焱华等[4 ] 利用ADAMS创建了铰接式车辆的机械系统模型.Yang等[5 ] 利用Simulink软件对铲运机液压转向系统的动态特性进行了仿真和讨论,结合SolidWorks和ADAMS/View环境建立了工作装置的可视化三维运动学/动力学模型[6 ] .Gao等[7 ] 开发了铰接式车辆液压转向系统的12自由度模型.何邕等[8 ] 在虚拟环境实现了铲斗的自动放平功能,并提高了铲斗的平移性和举升油缸的传力比.邓崛等[9 ] 运用解析法对铲运机工作装置进行初步设计,结合RecurDyn进行运动学分析,建立了优化模型.姚宗伟[10 ] 利用虚拟样机和试验为佐证,建立了铰接式车辆侧翻动力学模型.Kwangseok等[11 ] 在MATLAB/Simulink环境下建立并验证了一个综合轮式装载机仿真模型,以提高铲运机的性能和能量流.Li等[12 ] 在重点关注整体建模的前提下,提出基于特征的铲运机工作装置系统建模方法.当前广泛使用机器人操作系统(简称ROS)作为软件开发平台,可以为自主铲装作业的进一步开发提供应用框架、开发环境和第三方应用扩展.但上述研究中涉及的部分软件与ROS的联合开发便捷性不足,因此需选用新的仿真环境. ...
Analysis of handling stability for electric-driven articulated truck based on co-simulation
1
2014
... 目前主要应用ADAMS、SolidWorks等软件结合MATLAB/Simulink环境对铲运机整车及工作装置进行建模与仿真.申焱华等[4 ] 利用ADAMS创建了铰接式车辆的机械系统模型.Yang等[5 ] 利用Simulink软件对铲运机液压转向系统的动态特性进行了仿真和讨论,结合SolidWorks和ADAMS/View环境建立了工作装置的可视化三维运动学/动力学模型[6 ] .Gao等[7 ] 开发了铰接式车辆液压转向系统的12自由度模型.何邕等[8 ] 在虚拟环境实现了铲斗的自动放平功能,并提高了铲斗的平移性和举升油缸的传力比.邓崛等[9 ] 运用解析法对铲运机工作装置进行初步设计,结合RecurDyn进行运动学分析,建立了优化模型.姚宗伟[10 ] 利用虚拟样机和试验为佐证,建立了铰接式车辆侧翻动力学模型.Kwangseok等[11 ] 在MATLAB/Simulink环境下建立并验证了一个综合轮式装载机仿真模型,以提高铲运机的性能和能量流.Li等[12 ] 在重点关注整体建模的前提下,提出基于特征的铲运机工作装置系统建模方法.当前广泛使用机器人操作系统(简称ROS)作为软件开发平台,可以为自主铲装作业的进一步开发提供应用框架、开发环境和第三方应用扩展.但上述研究中涉及的部分软件与ROS的联合开发便捷性不足,因此需选用新的仿真环境. ...
基于虚拟样机的铲运机工作装置仿真及优化
1
2011
... 目前主要应用ADAMS、SolidWorks等软件结合MATLAB/Simulink环境对铲运机整车及工作装置进行建模与仿真.申焱华等[4 ] 利用ADAMS创建了铰接式车辆的机械系统模型.Yang等[5 ] 利用Simulink软件对铲运机液压转向系统的动态特性进行了仿真和讨论,结合SolidWorks和ADAMS/View环境建立了工作装置的可视化三维运动学/动力学模型[6 ] .Gao等[7 ] 开发了铰接式车辆液压转向系统的12自由度模型.何邕等[8 ] 在虚拟环境实现了铲斗的自动放平功能,并提高了铲斗的平移性和举升油缸的传力比.邓崛等[9 ] 运用解析法对铲运机工作装置进行初步设计,结合RecurDyn进行运动学分析,建立了优化模型.姚宗伟[10 ] 利用虚拟样机和试验为佐证,建立了铰接式车辆侧翻动力学模型.Kwangseok等[11 ] 在MATLAB/Simulink环境下建立并验证了一个综合轮式装载机仿真模型,以提高铲运机的性能和能量流.Li等[12 ] 在重点关注整体建模的前提下,提出基于特征的铲运机工作装置系统建模方法.当前广泛使用机器人操作系统(简称ROS)作为软件开发平台,可以为自主铲装作业的进一步开发提供应用框架、开发环境和第三方应用扩展.但上述研究中涉及的部分软件与ROS的联合开发便捷性不足,因此需选用新的仿真环境. ...
基于虚拟样机的铲运机工作装置仿真及优化
1
2011
... 目前主要应用ADAMS、SolidWorks等软件结合MATLAB/Simulink环境对铲运机整车及工作装置进行建模与仿真.申焱华等[4 ] 利用ADAMS创建了铰接式车辆的机械系统模型.Yang等[5 ] 利用Simulink软件对铲运机液压转向系统的动态特性进行了仿真和讨论,结合SolidWorks和ADAMS/View环境建立了工作装置的可视化三维运动学/动力学模型[6 ] .Gao等[7 ] 开发了铰接式车辆液压转向系统的12自由度模型.何邕等[8 ] 在虚拟环境实现了铲斗的自动放平功能,并提高了铲斗的平移性和举升油缸的传力比.邓崛等[9 ] 运用解析法对铲运机工作装置进行初步设计,结合RecurDyn进行运动学分析,建立了优化模型.姚宗伟[10 ] 利用虚拟样机和试验为佐证,建立了铰接式车辆侧翻动力学模型.Kwangseok等[11 ] 在MATLAB/Simulink环境下建立并验证了一个综合轮式装载机仿真模型,以提高铲运机的性能和能量流.Li等[12 ] 在重点关注整体建模的前提下,提出基于特征的铲运机工作装置系统建模方法.当前广泛使用机器人操作系统(简称ROS)作为软件开发平台,可以为自主铲装作业的进一步开发提供应用框架、开发环境和第三方应用扩展.但上述研究中涉及的部分软件与ROS的联合开发便捷性不足,因此需选用新的仿真环境. ...
基于虚拟样机的铲运机工作装置优化设计
1
2008
... 目前主要应用ADAMS、SolidWorks等软件结合MATLAB/Simulink环境对铲运机整车及工作装置进行建模与仿真.申焱华等[4 ] 利用ADAMS创建了铰接式车辆的机械系统模型.Yang等[5 ] 利用Simulink软件对铲运机液压转向系统的动态特性进行了仿真和讨论,结合SolidWorks和ADAMS/View环境建立了工作装置的可视化三维运动学/动力学模型[6 ] .Gao等[7 ] 开发了铰接式车辆液压转向系统的12自由度模型.何邕等[8 ] 在虚拟环境实现了铲斗的自动放平功能,并提高了铲斗的平移性和举升油缸的传力比.邓崛等[9 ] 运用解析法对铲运机工作装置进行初步设计,结合RecurDyn进行运动学分析,建立了优化模型.姚宗伟[10 ] 利用虚拟样机和试验为佐证,建立了铰接式车辆侧翻动力学模型.Kwangseok等[11 ] 在MATLAB/Simulink环境下建立并验证了一个综合轮式装载机仿真模型,以提高铲运机的性能和能量流.Li等[12 ] 在重点关注整体建模的前提下,提出基于特征的铲运机工作装置系统建模方法.当前广泛使用机器人操作系统(简称ROS)作为软件开发平台,可以为自主铲装作业的进一步开发提供应用框架、开发环境和第三方应用扩展.但上述研究中涉及的部分软件与ROS的联合开发便捷性不足,因此需选用新的仿真环境. ...
基于虚拟样机的铲运机工作装置优化设计
1
2008
... 目前主要应用ADAMS、SolidWorks等软件结合MATLAB/Simulink环境对铲运机整车及工作装置进行建模与仿真.申焱华等[4 ] 利用ADAMS创建了铰接式车辆的机械系统模型.Yang等[5 ] 利用Simulink软件对铲运机液压转向系统的动态特性进行了仿真和讨论,结合SolidWorks和ADAMS/View环境建立了工作装置的可视化三维运动学/动力学模型[6 ] .Gao等[7 ] 开发了铰接式车辆液压转向系统的12自由度模型.何邕等[8 ] 在虚拟环境实现了铲斗的自动放平功能,并提高了铲斗的平移性和举升油缸的传力比.邓崛等[9 ] 运用解析法对铲运机工作装置进行初步设计,结合RecurDyn进行运动学分析,建立了优化模型.姚宗伟[10 ] 利用虚拟样机和试验为佐证,建立了铰接式车辆侧翻动力学模型.Kwangseok等[11 ] 在MATLAB/Simulink环境下建立并验证了一个综合轮式装载机仿真模型,以提高铲运机的性能和能量流.Li等[12 ] 在重点关注整体建模的前提下,提出基于特征的铲运机工作装置系统建模方法.当前广泛使用机器人操作系统(简称ROS)作为软件开发平台,可以为自主铲装作业的进一步开发提供应用框架、开发环境和第三方应用扩展.但上述研究中涉及的部分软件与ROS的联合开发便捷性不足,因此需选用新的仿真环境. ...
铰接转向工程车辆侧倾稳定性研究
1
2013
... 目前主要应用ADAMS、SolidWorks等软件结合MATLAB/Simulink环境对铲运机整车及工作装置进行建模与仿真.申焱华等[4 ] 利用ADAMS创建了铰接式车辆的机械系统模型.Yang等[5 ] 利用Simulink软件对铲运机液压转向系统的动态特性进行了仿真和讨论,结合SolidWorks和ADAMS/View环境建立了工作装置的可视化三维运动学/动力学模型[6 ] .Gao等[7 ] 开发了铰接式车辆液压转向系统的12自由度模型.何邕等[8 ] 在虚拟环境实现了铲斗的自动放平功能,并提高了铲斗的平移性和举升油缸的传力比.邓崛等[9 ] 运用解析法对铲运机工作装置进行初步设计,结合RecurDyn进行运动学分析,建立了优化模型.姚宗伟[10 ] 利用虚拟样机和试验为佐证,建立了铰接式车辆侧翻动力学模型.Kwangseok等[11 ] 在MATLAB/Simulink环境下建立并验证了一个综合轮式装载机仿真模型,以提高铲运机的性能和能量流.Li等[12 ] 在重点关注整体建模的前提下,提出基于特征的铲运机工作装置系统建模方法.当前广泛使用机器人操作系统(简称ROS)作为软件开发平台,可以为自主铲装作业的进一步开发提供应用框架、开发环境和第三方应用扩展.但上述研究中涉及的部分软件与ROS的联合开发便捷性不足,因此需选用新的仿真环境. ...
铰接转向工程车辆侧倾稳定性研究
1
2013
... 目前主要应用ADAMS、SolidWorks等软件结合MATLAB/Simulink环境对铲运机整车及工作装置进行建模与仿真.申焱华等[4 ] 利用ADAMS创建了铰接式车辆的机械系统模型.Yang等[5 ] 利用Simulink软件对铲运机液压转向系统的动态特性进行了仿真和讨论,结合SolidWorks和ADAMS/View环境建立了工作装置的可视化三维运动学/动力学模型[6 ] .Gao等[7 ] 开发了铰接式车辆液压转向系统的12自由度模型.何邕等[8 ] 在虚拟环境实现了铲斗的自动放平功能,并提高了铲斗的平移性和举升油缸的传力比.邓崛等[9 ] 运用解析法对铲运机工作装置进行初步设计,结合RecurDyn进行运动学分析,建立了优化模型.姚宗伟[10 ] 利用虚拟样机和试验为佐证,建立了铰接式车辆侧翻动力学模型.Kwangseok等[11 ] 在MATLAB/Simulink环境下建立并验证了一个综合轮式装载机仿真模型,以提高铲运机的性能和能量流.Li等[12 ] 在重点关注整体建模的前提下,提出基于特征的铲运机工作装置系统建模方法.当前广泛使用机器人操作系统(简称ROS)作为软件开发平台,可以为自主铲装作业的进一步开发提供应用框架、开发环境和第三方应用扩展.但上述研究中涉及的部分软件与ROS的联合开发便捷性不足,因此需选用新的仿真环境. ...
Integrated wheel loader simulation model for improving performance and energy flow
1
2015
... 目前主要应用ADAMS、SolidWorks等软件结合MATLAB/Simulink环境对铲运机整车及工作装置进行建模与仿真.申焱华等[4 ] 利用ADAMS创建了铰接式车辆的机械系统模型.Yang等[5 ] 利用Simulink软件对铲运机液压转向系统的动态特性进行了仿真和讨论,结合SolidWorks和ADAMS/View环境建立了工作装置的可视化三维运动学/动力学模型[6 ] .Gao等[7 ] 开发了铰接式车辆液压转向系统的12自由度模型.何邕等[8 ] 在虚拟环境实现了铲斗的自动放平功能,并提高了铲斗的平移性和举升油缸的传力比.邓崛等[9 ] 运用解析法对铲运机工作装置进行初步设计,结合RecurDyn进行运动学分析,建立了优化模型.姚宗伟[10 ] 利用虚拟样机和试验为佐证,建立了铰接式车辆侧翻动力学模型.Kwangseok等[11 ] 在MATLAB/Simulink环境下建立并验证了一个综合轮式装载机仿真模型,以提高铲运机的性能和能量流.Li等[12 ] 在重点关注整体建模的前提下,提出基于特征的铲运机工作装置系统建模方法.当前广泛使用机器人操作系统(简称ROS)作为软件开发平台,可以为自主铲装作业的进一步开发提供应用框架、开发环境和第三方应用扩展.但上述研究中涉及的部分软件与ROS的联合开发便捷性不足,因此需选用新的仿真环境. ...
Three dimensional modeling of the working linkage of load-haul-dump loader
1
2007
... 目前主要应用ADAMS、SolidWorks等软件结合MATLAB/Simulink环境对铲运机整车及工作装置进行建模与仿真.申焱华等[4 ] 利用ADAMS创建了铰接式车辆的机械系统模型.Yang等[5 ] 利用Simulink软件对铲运机液压转向系统的动态特性进行了仿真和讨论,结合SolidWorks和ADAMS/View环境建立了工作装置的可视化三维运动学/动力学模型[6 ] .Gao等[7 ] 开发了铰接式车辆液压转向系统的12自由度模型.何邕等[8 ] 在虚拟环境实现了铲斗的自动放平功能,并提高了铲斗的平移性和举升油缸的传力比.邓崛等[9 ] 运用解析法对铲运机工作装置进行初步设计,结合RecurDyn进行运动学分析,建立了优化模型.姚宗伟[10 ] 利用虚拟样机和试验为佐证,建立了铰接式车辆侧翻动力学模型.Kwangseok等[11 ] 在MATLAB/Simulink环境下建立并验证了一个综合轮式装载机仿真模型,以提高铲运机的性能和能量流.Li等[12 ] 在重点关注整体建模的前提下,提出基于特征的铲运机工作装置系统建模方法.当前广泛使用机器人操作系统(简称ROS)作为软件开发平台,可以为自主铲装作业的进一步开发提供应用框架、开发环境和第三方应用扩展.但上述研究中涉及的部分软件与ROS的联合开发便捷性不足,因此需选用新的仿真环境. ...
地下矿用铰接车路径跟踪与智能避障控制研究
1
2018
... 井下铲运机采用铰接式结构,其车身可简单视为由中间铰销连接的前、后两部分车体[13 ,14 ] .前车体布置有铲斗工作装置,后车体则为整个车身提供动力源.铲运机依赖工作装置与矿石的相互作用来实现铲装运卸作业,其结构和性能直接影响着矿山企业的日常生产效率.因此,工作装置是铲运机建模的重要部分.不同工作场景下的铲斗结构不尽相同[15 ] ,但在工作过程中具有相似的工作状态,所以本文仅选取某型号正转四杆机构的井下铲运机进行仿真试验. ...
地下矿用铰接车路径跟踪与智能避障控制研究
1
2018
... 井下铲运机采用铰接式结构,其车身可简单视为由中间铰销连接的前、后两部分车体[13 ,14 ] .前车体布置有铲斗工作装置,后车体则为整个车身提供动力源.铲运机依赖工作装置与矿石的相互作用来实现铲装运卸作业,其结构和性能直接影响着矿山企业的日常生产效率.因此,工作装置是铲运机建模的重要部分.不同工作场景下的铲斗结构不尽相同[15 ] ,但在工作过程中具有相似的工作状态,所以本文仅选取某型号正转四杆机构的井下铲运机进行仿真试验. ...
矿用铲运机前后机架的优化设计
1
2012
... 井下铲运机采用铰接式结构,其车身可简单视为由中间铰销连接的前、后两部分车体[13 ,14 ] .前车体布置有铲斗工作装置,后车体则为整个车身提供动力源.铲运机依赖工作装置与矿石的相互作用来实现铲装运卸作业,其结构和性能直接影响着矿山企业的日常生产效率.因此,工作装置是铲运机建模的重要部分.不同工作场景下的铲斗结构不尽相同[15 ] ,但在工作过程中具有相似的工作状态,所以本文仅选取某型号正转四杆机构的井下铲运机进行仿真试验. ...
矿用铲运机前后机架的优化设计
1
2012
... 井下铲运机采用铰接式结构,其车身可简单视为由中间铰销连接的前、后两部分车体[13 ,14 ] .前车体布置有铲斗工作装置,后车体则为整个车身提供动力源.铲运机依赖工作装置与矿石的相互作用来实现铲装运卸作业,其结构和性能直接影响着矿山企业的日常生产效率.因此,工作装置是铲运机建模的重要部分.不同工作场景下的铲斗结构不尽相同[15 ] ,但在工作过程中具有相似的工作状态,所以本文仅选取某型号正转四杆机构的井下铲运机进行仿真试验. ...
铲运机工作装置的设计
1
2005
... 井下铲运机采用铰接式结构,其车身可简单视为由中间铰销连接的前、后两部分车体[13 ,14 ] .前车体布置有铲斗工作装置,后车体则为整个车身提供动力源.铲运机依赖工作装置与矿石的相互作用来实现铲装运卸作业,其结构和性能直接影响着矿山企业的日常生产效率.因此,工作装置是铲运机建模的重要部分.不同工作场景下的铲斗结构不尽相同[15 ] ,但在工作过程中具有相似的工作状态,所以本文仅选取某型号正转四杆机构的井下铲运机进行仿真试验. ...
铲运机工作装置的设计
1
2005
... 井下铲运机采用铰接式结构,其车身可简单视为由中间铰销连接的前、后两部分车体[13 ,14 ] .前车体布置有铲斗工作装置,后车体则为整个车身提供动力源.铲运机依赖工作装置与矿石的相互作用来实现铲装运卸作业,其结构和性能直接影响着矿山企业的日常生产效率.因此,工作装置是铲运机建模的重要部分.不同工作场景下的铲斗结构不尽相同[15 ] ,但在工作过程中具有相似的工作状态,所以本文仅选取某型号正转四杆机构的井下铲运机进行仿真试验. ...
虚拟现实中物理引擎关键技术的研究与应用
1
2010
... 在V-REP中直接建立铲运机模型简单高效、通用性强,但由于提供的基础形状较为简单,无法很好地复现铲运机的工作过程.另一种方法是在3D Studio Max中建立贴图,然后在V-REP中逐步为模型添加物理属性[16 ] .该方法能够保证铲运机模型形态足够逼真,可实现较好的仿真效果.为避免复杂模型在导入过程中出现未知错误,对模型进行如下简化处理[17 ] : ...
虚拟现实中物理引擎关键技术的研究与应用
1
2010
... 在V-REP中直接建立铲运机模型简单高效、通用性强,但由于提供的基础形状较为简单,无法很好地复现铲运机的工作过程.另一种方法是在3D Studio Max中建立贴图,然后在V-REP中逐步为模型添加物理属性[16 ] .该方法能够保证铲运机模型形态足够逼真,可实现较好的仿真效果.为避免复杂模型在导入过程中出现未知错误,对模型进行如下简化处理[17 ] : ...
基于虚拟样机技术的地下铲运机稳定性研究
1
2015
... 在V-REP中直接建立铲运机模型简单高效、通用性强,但由于提供的基础形状较为简单,无法很好地复现铲运机的工作过程.另一种方法是在3D Studio Max中建立贴图,然后在V-REP中逐步为模型添加物理属性[16 ] .该方法能够保证铲运机模型形态足够逼真,可实现较好的仿真效果.为避免复杂模型在导入过程中出现未知错误,对模型进行如下简化处理[17 ] : ...
基于虚拟样机技术的地下铲运机稳定性研究
1
2015
... 在V-REP中直接建立铲运机模型简单高效、通用性强,但由于提供的基础形状较为简单,无法很好地复现铲运机的工作过程.另一种方法是在3D Studio Max中建立贴图,然后在V-REP中逐步为模型添加物理属性[16 ] .该方法能够保证铲运机模型形态足够逼真,可实现较好的仿真效果.为避免复杂模型在导入过程中出现未知错误,对模型进行如下简化处理[17 ] : ...
新型PID控制及其应用——第一讲PID控制原理和自整定策略
1
... 在关节的动力学属性设置中,用户可以设置是否启用关节电机和控制回路.本文控制回路选用V-REP内自带的PID控制器调节铰接关节和动臂前后关节.PID控制器被广泛应用于工业过程控制[18 ] ,通过改变比例系数、积分系数和微分系数即可调整关节位置.由于V-REP中不支持直接输出位置环,因此换算为速度环.关节某时刻的速度V 可表示为 ...
新型PID控制及其应用——第一讲PID控制原理和自整定策略
1
... 在关节的动力学属性设置中,用户可以设置是否启用关节电机和控制回路.本文控制回路选用V-REP内自带的PID控制器调节铰接关节和动臂前后关节.PID控制器被广泛应用于工业过程控制[18 ] ,通过改变比例系数、积分系数和微分系数即可调整关节位置.由于V-REP中不支持直接输出位置环,因此换算为速度环.关节某时刻的速度V 可表示为 ...
浅析游戏脚本语言Lua
1
2010
... 本文使用V-REP中默认的Lua语言编写控制脚本操纵铲运机及其工作环境的一系列仿真动作,Lua语言小巧高效,可以提供灵活的扩展和定制功能[19 ] .同时使用游戏手柄作为外接控制设备,编写控制插件同V-REP进行数据传输. ...
浅析游戏脚本语言Lua
1
2010
... 本文使用V-REP中默认的Lua语言编写控制脚本操纵铲运机及其工作环境的一系列仿真动作,Lua语言小巧高效,可以提供灵活的扩展和定制功能[19 ] .同时使用游戏手柄作为外接控制设备,编写控制插件同V-REP进行数据传输. ...
轮式装载机
1
2005
... 作为铰接式车辆,铲运机通过前、后车架绕中间铰销的相对转动来实现,因此两侧车轮转动平面始终保持相对平行[20 ] .过前后车轴线做底面的垂面,这2个平面的交线即为转动轴线,该轴线在水平面的投影点为O,铲运机绕此线作无滑动的纯滚动.为保证转向仿真过程中车体的稳定性,应为内外两侧车轮配置不同转速. ...
轮式装载机
1
2005
... 作为铰接式车辆,铲运机通过前、后车架绕中间铰销的相对转动来实现,因此两侧车轮转动平面始终保持相对平行[20 ] .过前后车轴线做底面的垂面,这2个平面的交线即为转动轴线,该轴线在水平面的投影点为O,铲运机绕此线作无滑动的纯滚动.为保证转向仿真过程中车体的稳定性,应为内外两侧车轮配置不同转速. ...
汽车自动变速箱的发展现状及其技术趋势
1
2010
... 通过上述公式均可求出四轮速度,从而避免了因四轮同速导致铲运机仿真时出现失稳现象.在V-REP中还可为轮胎设置不同速度来实现变速箱的相应功能,从而满足各种工况对铲运机牵引力和速度的要求[21 ] . ...
汽车自动变速箱的发展现状及其技术趋势
1
2010
... 通过上述公式均可求出四轮速度,从而避免了因四轮同速导致铲运机仿真时出现失稳现象.在V-REP中还可为轮胎设置不同速度来实现变速箱的相应功能,从而满足各种工况对铲运机牵引力和速度的要求[21 ] . ...
地下铲运机
1
2002
... (1) 铲装过程.完成建模和脚本编写,即可操纵铲运机模型在仿真环境中模拟真实作业过程.铲运机的工作装置一般涉及5种工况[22 ] ,即插入工况、铲装工况、满载运输工况、卸载工况和空载运输工况.本文将这5种工况总结为铲装过程、运输过程和卸载过程.铲装作业包含插入工况和铲装工况,由于需要实时控制,且铲斗与矿石模型接触时存在大量碰撞计算,该过程显得极为重要. ...
地下铲运机
1
2002
... (1) 铲装过程.完成建模和脚本编写,即可操纵铲运机模型在仿真环境中模拟真实作业过程.铲运机的工作装置一般涉及5种工况[22 ] ,即插入工况、铲装工况、满载运输工况、卸载工况和空载运输工况.本文将这5种工况总结为铲装过程、运输过程和卸载过程.铲装作业包含插入工况和铲装工况,由于需要实时控制,且铲斗与矿石模型接触时存在大量碰撞计算,该过程显得极为重要. ...






 甘公网安备 62010202000672号
甘公网安备 62010202000672号
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}