With the rapid development of unmanned driving technology,the driverless vehicles on the road have been widely used,which has laid a solid foundation for the fully unmanned mine.Especially for un-derground operation equipment,the roadway environment has the characteristics of closedness,irregular driving area,and difficulty in environmental perception,which makes the mobile equipment of underground manual driving inefficient and frequent accidents.So in a chaotic,irregular and dynamic environment,a safe and efficient autonomous navigation system is essential.The traditional autonomous navigation of underground mobile equipment mainly relies on pre-established static maps to make global path planning,then directly hands over the global path to control model,which makes it impossible to update the map in time when encountering sudden obstacles,resulting in oscillating trajectories and crooked paths.In order to solve the above problems,this article proposed the improved TEB (Time Elastic Band) local path planning to quickly update the path by combining global planning and local planning on the basis of mapping and navigation.In order to adapt the underground roadway environment, add target point constraints,urgency constraints,end smoothing constraints and energy consumption constraints,the nonlinear optimization problem can be iteratively solved through the G2O graph optimization framework to obtain a suboptimal solution that meets the requirements,the programming speed is within 100 ms.By simulating the dual-lane collision-free,dual-lane oncoming traffic,dynamic crossing scene,according to the principle of underground driving,the improved TEB algorithm produces a more feasible trajectory,which effectively shortens the path length,reduces the number of turns and stops,especially the path smoothness at the corner,and the operating efficiency is higher than the traditional TEB path planning algorithm.The average path generation value before the improvement was 23.09,and the average path generation value after the improvement was 10.19,which decreased the overall generation value by 55.87%.Finally,the unmanned vehicle experimental platform is used to build random obstacles in the underground roadway scene according to the 9∶1 scale,and the feasibility of the algorithm is verified in the dynamic cross environment,which can satisfy the safe and efficient driving of underground mobile equipment in the roadway.
LIU Zhuo, JIA Mingtao, WANG Liguan. Research on Path Planning of Mobile Equipment in Dynamic Confined Space of Underground Roadway[J]. Gold Science and Technology, 2023, 31(2): 302-312 doi:10.11872/j.issn.1005-2518.2023.02.149
近年来,无人驾驶技术在各个领域的发展十分迅猛,例如露天矿卡的无人化、地下采矿装备的智能化和地面交通工具的无人化等。对于无人驾驶车辆,环境建图、即时定位、轨迹规划和车辆控制是其自主导航的必要环节,其中路径规划是其自主行走的核心要素(陈盟等,2013)。地下移动装备在复杂多变的巷道或采场环境中运行,运输路线上可能临时出现人员或设备等障碍物,而且巷道会随着采掘推进而动态延伸,这时地下装备通常无法准确获取真实的环境信息,这就需要进行局部路径规划,生成动态的可实际运行路线,以达到主动避障、安全行车的目的(Larsson et al.,2006)。
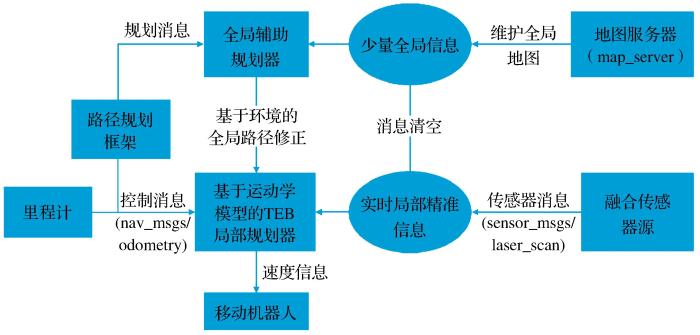
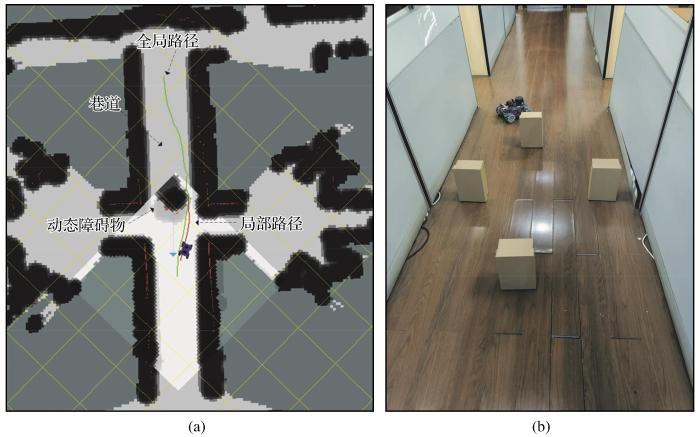
Fig.1
General path plan graph of underground equipment
前人针对地下装备路径规划问题开展了若干研究。白国星等(2020)开发了一种铰接式地下车辆的引导系统,通过路径跟踪方法能够在隧道环境下进行自主导航。Ma et al.(2020)将传统的利用欧几里得距离的D*算法改进为更适合地下矿山环境的曼哈顿距离,提高了路径规划的计算效率。Wang et al.(2022)改进了RRT*全局路径规划算法,解决了地下铰接结构车辆在巷道环境的路径规划问题,实现了地下装备的运动学特性。鲍久圣等(2022)提出基于改进A*和人工势场算法用于井下无轨胶轮车的路径规划,通过全局与局部路径规划算法,规划出可供无人驾驶无轨胶轮车会车或避障行驶的合理路径。综上可知,目前针对地下装备路径规划的研究较少,且提出的算法没有考虑在环境更新时如何动态更新路径,也无法在遇到动态障碍物时产生可行性较高的轨迹。
为了应对上述问题,研究人员提出了一种在线轨迹规划算法,即时间弹性带(TEB)方法(Rösmann et al.,2012,2013,2017),该算法已推广到一种有效的动态系统时间最优模型预测控制方法。此外,为了克服传统的本地规划器无法穿越动态障碍物的缺点,研究人员提出了在候选轨迹中切换到当前的最优轨迹,并通过构建运动模型对机器人未来状态进行预测,采用二次规划来进一步优化轨迹。陈纪廷等(2021)在传统TEB算法的基础上将障碍物聚类为凸多边形,降低了障碍物约束的计算量,提高了导航的实时性。陈奕梅等(2022)提出多机器人环境下TEB算法在动态避障时轨迹欠佳且速度输出不稳定的问题,将TEB算法与速度障碍法(VO)进行了融合,使得TEB算法在应对动态障碍物时效率更高。Smith et al.(2020)提出了egoTEB算法,通过使用以自我为中心的感知空间来表示局部代价地图,使得TEB算法在不确定环境中具有更高的稳定性。Zhang et al.(2018)提出将自动导航和自动泊车无缝集成的两阶段TEB规划算法,生成了自动驾驶汽车自动泊车所需的轨迹。
曲率约束表示移动装备的最大转弯半径,由于在地下受限空间,移动装备的最大转弯半径必须约束在一定范围内,以保证地下装备行驶路径的平滑性(Duff et al.,2003),若其在转角位置或遇到动态障碍物时转角过大将会导致失稳。为了确保可驾驶性,曲率约束在每个顶点处都限制了路径的瞬时曲率,当时,其优化函数可表示为
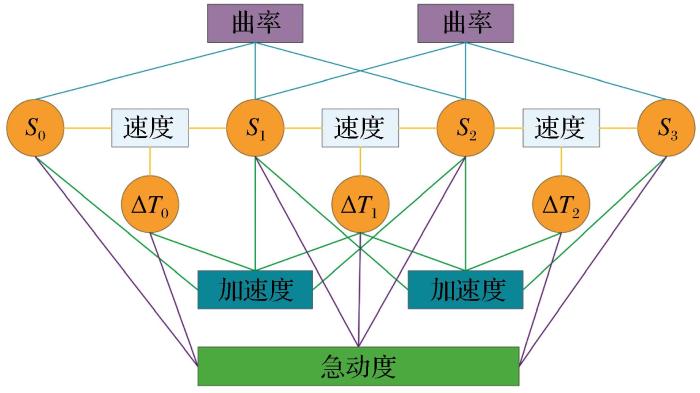
本文采用图优化框架G2O(Kummerle et al.,2011)变步长迭代求解,通过只接受使得目标函数代价下降的步长加快求解效率。其中,顶点为移动装备状态、相邻位姿的时间间隔、障碍物以及目标点,边为相应的约束,而且路径点与障碍以及时间的优化求解正好可以用超图的形式表现,从而更直观地描述了求解的问题。改进的超图如图2所示。
Real-time path tracking of mobile robot based on nonlinear model predictive control
[J].Transactions of the Chinese Society for Agricultural Machinery,51(9):47-52,60.
BaoJiusheng, ZhangMuye, GeShirong,et al,2022.
Underground driverless path planning of trackless rubber wheeler based on improved A* and artificial potential field algorithms
[J].Journal of China Coal Society,47(3):1347-1360.
ChenJiting, GuoChen, LiuYi,2021.
Path optimization method of mobile robot based on time elastic band
[J].Science Technology and Engineering,21(26):11212-11219.
ChenMeng, WangLiguan, JiaMingtao,et al,2013.
An overview of autonomous navigation techniques and development trend for underground LHD
[J].China Safety Science Journal,23(3):130-134.
ChenYimei, ShenJianfeng, LiBingqi,2022.
Research on multi-robot dynamic obstacle avoidance strategy with improved TEB algorithm
[J].Electro-Optic and Control,29(5):107-112.
DuffE S, RobertsJ M, CorkeP I,2003.
Automation of an underground mining vehicle using reactive navigation and opportunistic localization
[C]//Proceedings 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003)(Cat No 03CH37453),IEEEL,VegasLas,NV,USA.DOI:10.1109/IROS.2003.1249742.
Downhole robot path planning based on improved D* algorithmn
[C]// Proceedings of the 2020 IEEE International Conference on Signal Processing,Communications and Computing (ICSPCC).DOI:10.1109/ICSPCC50002.2020.9258532.
Kinodynamic trajectory optimization and control for car-like robots
[C]//Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE Vancouver,BC,Canada.DOI:10.1109/IROS.2017.8206458.
Real-time path tracking of mobile robot based on nonlinear model predictive control
0
2020
Underground driverless path planning of trackless rubber wheeler based on improved A* and artificial potential field algorithms
0
2022
Path optimization method of mobile robot based on time elastic band
0
2021
An overview of autonomous navigation techniques and development trend for underground LHD
0
2013
Research on multi-robot dynamic obstacle avoidance strategy with improved TEB algorithm
0
2022
Automation of an underground mining vehicle using reactive navigation and opportunistic localization
1
2003
... 曲率约束表示移动装备的最大转弯半径,由于在地下受限空间,移动装备的最大转弯半径必须约束在一定范围内,以保证地下装备行驶路径的平滑性(Duff et al.,2003),若其在转角位置或遇到动态障碍物时转角过大将会导致失稳.为了确保可驾驶性,曲率约束在每个顶点处都限制了路径的瞬时曲率,当时,其优化函数可表示为 ...
Optimal trajectory planning for energy consumption of mobile robots based on motion control and frequency domain analysis
0
2020
Autonomous navigation technology for underground unmanned vehicles based on genetic algorithm-backpropagation neural network
0
2018
A general framework for graph optimization
1
2011
... 本文采用图优化框架G2O(Kummerle et al.,2011)变步长迭代求解,通过只接受使得目标函数代价下降的步长加快求解效率.其中,顶点为移动装备状态、相邻位姿的时间间隔、障碍物以及目标点,边为相应的约束,而且路径点与障碍以及时间的优化求解正好可以用超图的形式表现,从而更直观地描述了求解的问题.改进的超图如图2所示. ...
A navigation system for automated loaders in underground mines
1
2006
... 近年来,无人驾驶技术在各个领域的发展十分迅猛,例如露天矿卡的无人化、地下采矿装备的智能化和地面交通工具的无人化等.对于无人驾驶车辆,环境建图、即时定位、轨迹规划和车辆控制是其自主导航的必要环节,其中路径规划是其自主行走的核心要素(陈盟等,2013).地下移动装备在复杂多变的巷道或采场环境中运行,运输路线上可能临时出现人员或设备等障碍物,而且巷道会随着采掘推进而动态延伸,这时地下装备通常无法准确获取真实的环境信息,这就需要进行局部路径规划,生成动态的可实际运行路线,以达到主动避障、安全行车的目的(Larsson et al.,2006). ...
Reactive navigation system of underground unmanned Load-Haul-Dump unit based on NMPC
0
2020
Downhole robot path planning based on improved D* algorithmn
1
2020
... 前人针对地下装备路径规划问题开展了若干研究.白国星等(2020)开发了一种铰接式地下车辆的引导系统,通过路径跟踪方法能够在隧道环境下进行自主导航.Ma et al.(2020)将传统的利用欧几里得距离的D*算法改进为更适合地下矿山环境的曼哈顿距离,提高了路径规划的计算效率.Wang et al.(2022)改进了RRT*全局路径规划算法,解决了地下铰接结构车辆在巷道环境的路径规划问题,实现了地下装备的运动学特性.鲍久圣等(2022)提出基于改进A*和人工势场算法用于井下无轨胶轮车的路径规划,通过全局与局部路径规划算法,规划出可供无人驾驶无轨胶轮车会车或避障行驶的合理路径.综上可知,目前针对地下装备路径规划的研究较少,且提出的算法没有考虑在环境更新时如何动态更新路径,也无法在遇到动态障碍物时产生可行性较高的轨迹. ...
Trajectory modification considering dynamic constraints of autonomous robots
1
2012
... 为了应对上述问题,研究人员提出了一种在线轨迹规划算法,即时间弹性带(TEB)方法(Rösmann et al.,2012,2013,2017),该算法已推广到一种有效的动态系统时间最优模型预测控制方法.此外,为了克服传统的本地规划器无法穿越动态障碍物的缺点,研究人员提出了在候选轨迹中切换到当前的最优轨迹,并通过构建运动模型对机器人未来状态进行预测,采用二次规划来进一步优化轨迹.陈纪廷等(2021)在传统TEB算法的基础上将障碍物聚类为凸多边形,降低了障碍物约束的计算量,提高了导航的实时性.陈奕梅等(2022)提出多机器人环境下TEB算法在动态避障时轨迹欠佳且速度输出不稳定的问题,将TEB算法与速度障碍法(VO)进行了融合,使得TEB算法在应对动态障碍物时效率更高.Smith et al.(2020)提出了egoTEB算法,通过使用以自我为中心的感知空间来表示局部代价地图,使得TEB算法在不确定环境中具有更高的稳定性.Zhang et al.(2018)提出将自动导航和自动泊车无缝集成的两阶段TEB规划算法,生成了自动驾驶汽车自动泊车所需的轨迹. ...
Efficient trajectory optimization using a sparse model
1
2013
... 为了应对上述问题,研究人员提出了一种在线轨迹规划算法,即时间弹性带(TEB)方法(Rösmann et al.,2012,2013,2017),该算法已推广到一种有效的动态系统时间最优模型预测控制方法.此外,为了克服传统的本地规划器无法穿越动态障碍物的缺点,研究人员提出了在候选轨迹中切换到当前的最优轨迹,并通过构建运动模型对机器人未来状态进行预测,采用二次规划来进一步优化轨迹.陈纪廷等(2021)在传统TEB算法的基础上将障碍物聚类为凸多边形,降低了障碍物约束的计算量,提高了导航的实时性.陈奕梅等(2022)提出多机器人环境下TEB算法在动态避障时轨迹欠佳且速度输出不稳定的问题,将TEB算法与速度障碍法(VO)进行了融合,使得TEB算法在应对动态障碍物时效率更高.Smith et al.(2020)提出了egoTEB算法,通过使用以自我为中心的感知空间来表示局部代价地图,使得TEB算法在不确定环境中具有更高的稳定性.Zhang et al.(2018)提出将自动导航和自动泊车无缝集成的两阶段TEB规划算法,生成了自动驾驶汽车自动泊车所需的轨迹. ...
Kinodynamic trajectory optimization and control for car-like robots
1
2017
... 为了应对上述问题,研究人员提出了一种在线轨迹规划算法,即时间弹性带(TEB)方法(Rösmann et al.,2012,2013,2017),该算法已推广到一种有效的动态系统时间最优模型预测控制方法.此外,为了克服传统的本地规划器无法穿越动态障碍物的缺点,研究人员提出了在候选轨迹中切换到当前的最优轨迹,并通过构建运动模型对机器人未来状态进行预测,采用二次规划来进一步优化轨迹.陈纪廷等(2021)在传统TEB算法的基础上将障碍物聚类为凸多边形,降低了障碍物约束的计算量,提高了导航的实时性.陈奕梅等(2022)提出多机器人环境下TEB算法在动态避障时轨迹欠佳且速度输出不稳定的问题,将TEB算法与速度障碍法(VO)进行了融合,使得TEB算法在应对动态障碍物时效率更高.Smith et al.(2020)提出了egoTEB算法,通过使用以自我为中心的感知空间来表示局部代价地图,使得TEB算法在不确定环境中具有更高的稳定性.Zhang et al.(2018)提出将自动导航和自动泊车无缝集成的两阶段TEB规划算法,生成了自动驾驶汽车自动泊车所需的轨迹. ...
Egoteb:Egocentric,perception space navigation using timed-elastic-bands
1
2020
... 为了应对上述问题,研究人员提出了一种在线轨迹规划算法,即时间弹性带(TEB)方法(Rösmann et al.,2012,2013,2017),该算法已推广到一种有效的动态系统时间最优模型预测控制方法.此外,为了克服传统的本地规划器无法穿越动态障碍物的缺点,研究人员提出了在候选轨迹中切换到当前的最优轨迹,并通过构建运动模型对机器人未来状态进行预测,采用二次规划来进一步优化轨迹.陈纪廷等(2021)在传统TEB算法的基础上将障碍物聚类为凸多边形,降低了障碍物约束的计算量,提高了导航的实时性.陈奕梅等(2022)提出多机器人环境下TEB算法在动态避障时轨迹欠佳且速度输出不稳定的问题,将TEB算法与速度障碍法(VO)进行了融合,使得TEB算法在应对动态障碍物时效率更高.Smith et al.(2020)提出了egoTEB算法,通过使用以自我为中心的感知空间来表示局部代价地图,使得TEB算法在不确定环境中具有更高的稳定性.Zhang et al.(2018)提出将自动导航和自动泊车无缝集成的两阶段TEB规划算法,生成了自动驾驶汽车自动泊车所需的轨迹. ...
A path planning method for underground intelligent vehicles based on an improved RRT* algorithm
1
2022
... 前人针对地下装备路径规划问题开展了若干研究.白国星等(2020)开发了一种铰接式地下车辆的引导系统,通过路径跟踪方法能够在隧道环境下进行自主导航.Ma et al.(2020)将传统的利用欧几里得距离的D*算法改进为更适合地下矿山环境的曼哈顿距离,提高了路径规划的计算效率.Wang et al.(2022)改进了RRT*全局路径规划算法,解决了地下铰接结构车辆在巷道环境的路径规划问题,实现了地下装备的运动学特性.鲍久圣等(2022)提出基于改进A*和人工势场算法用于井下无轨胶轮车的路径规划,通过全局与局部路径规划算法,规划出可供无人驾驶无轨胶轮车会车或避障行驶的合理路径.综上可知,目前针对地下装备路径规划的研究较少,且提出的算法没有考虑在环境更新时如何动态更新路径,也无法在遇到动态障碍物时产生可行性较高的轨迹. ...
Reactive navigation for underground autonomous scraper
0
2011
Optimal motion trajectory planning method for energy consumption of two-wheel self-balancing mobile robot
0
2022
A practical study of time-elastic-band planning method for driverless vehicle for auto-parking
1
2018
... 为了应对上述问题,研究人员提出了一种在线轨迹规划算法,即时间弹性带(TEB)方法(Rösmann et al.,2012,2013,2017),该算法已推广到一种有效的动态系统时间最优模型预测控制方法.此外,为了克服传统的本地规划器无法穿越动态障碍物的缺点,研究人员提出了在候选轨迹中切换到当前的最优轨迹,并通过构建运动模型对机器人未来状态进行预测,采用二次规划来进一步优化轨迹.陈纪廷等(2021)在传统TEB算法的基础上将障碍物聚类为凸多边形,降低了障碍物约束的计算量,提高了导航的实时性.陈奕梅等(2022)提出多机器人环境下TEB算法在动态避障时轨迹欠佳且速度输出不稳定的问题,将TEB算法与速度障碍法(VO)进行了融合,使得TEB算法在应对动态障碍物时效率更高.Smith et al.(2020)提出了egoTEB算法,通过使用以自我为中心的感知空间来表示局部代价地图,使得TEB算法在不确定环境中具有更高的稳定性.Zhang et al.(2018)提出将自动导航和自动泊车无缝集成的两阶段TEB规划算法,生成了自动驾驶汽车自动泊车所需的轨迹. ...
基于非线性模型预测控制的移动机器人实时路径跟踪
1
2020
... 前人针对地下装备路径规划问题开展了若干研究.白国星等(2020)开发了一种铰接式地下车辆的引导系统,通过路径跟踪方法能够在隧道环境下进行自主导航.Ma et al.(2020)将传统的利用欧几里得距离的D*算法改进为更适合地下矿山环境的曼哈顿距离,提高了路径规划的计算效率.Wang et al.(2022)改进了RRT*全局路径规划算法,解决了地下铰接结构车辆在巷道环境的路径规划问题,实现了地下装备的运动学特性.鲍久圣等(2022)提出基于改进A*和人工势场算法用于井下无轨胶轮车的路径规划,通过全局与局部路径规划算法,规划出可供无人驾驶无轨胶轮车会车或避障行驶的合理路径.综上可知,目前针对地下装备路径规划的研究较少,且提出的算法没有考虑在环境更新时如何动态更新路径,也无法在遇到动态障碍物时产生可行性较高的轨迹. ...
基于改进A*和人工势场算法的无轨胶轮车井下无人驾驶路径规划
1
2022
... 前人针对地下装备路径规划问题开展了若干研究.白国星等(2020)开发了一种铰接式地下车辆的引导系统,通过路径跟踪方法能够在隧道环境下进行自主导航.Ma et al.(2020)将传统的利用欧几里得距离的D*算法改进为更适合地下矿山环境的曼哈顿距离,提高了路径规划的计算效率.Wang et al.(2022)改进了RRT*全局路径规划算法,解决了地下铰接结构车辆在巷道环境的路径规划问题,实现了地下装备的运动学特性.鲍久圣等(2022)提出基于改进A*和人工势场算法用于井下无轨胶轮车的路径规划,通过全局与局部路径规划算法,规划出可供无人驾驶无轨胶轮车会车或避障行驶的合理路径.综上可知,目前针对地下装备路径规划的研究较少,且提出的算法没有考虑在环境更新时如何动态更新路径,也无法在遇到动态障碍物时产生可行性较高的轨迹. ...
基于时间弹性带的移动机器人路径优化方法
1
2021
... 为了应对上述问题,研究人员提出了一种在线轨迹规划算法,即时间弹性带(TEB)方法(Rösmann et al.,2012,2013,2017),该算法已推广到一种有效的动态系统时间最优模型预测控制方法.此外,为了克服传统的本地规划器无法穿越动态障碍物的缺点,研究人员提出了在候选轨迹中切换到当前的最优轨迹,并通过构建运动模型对机器人未来状态进行预测,采用二次规划来进一步优化轨迹.陈纪廷等(2021)在传统TEB算法的基础上将障碍物聚类为凸多边形,降低了障碍物约束的计算量,提高了导航的实时性.陈奕梅等(2022)提出多机器人环境下TEB算法在动态避障时轨迹欠佳且速度输出不稳定的问题,将TEB算法与速度障碍法(VO)进行了融合,使得TEB算法在应对动态障碍物时效率更高.Smith et al.(2020)提出了egoTEB算法,通过使用以自我为中心的感知空间来表示局部代价地图,使得TEB算法在不确定环境中具有更高的稳定性.Zhang et al.(2018)提出将自动导航和自动泊车无缝集成的两阶段TEB规划算法,生成了自动驾驶汽车自动泊车所需的轨迹. ...
地下铲运机自主导航研究现状及发展趋势
1
2013
... 近年来,无人驾驶技术在各个领域的发展十分迅猛,例如露天矿卡的无人化、地下采矿装备的智能化和地面交通工具的无人化等.对于无人驾驶车辆,环境建图、即时定位、轨迹规划和车辆控制是其自主导航的必要环节,其中路径规划是其自主行走的核心要素(陈盟等,2013).地下移动装备在复杂多变的巷道或采场环境中运行,运输路线上可能临时出现人员或设备等障碍物,而且巷道会随着采掘推进而动态延伸,这时地下装备通常无法准确获取真实的环境信息,这就需要进行局部路径规划,生成动态的可实际运行路线,以达到主动避障、安全行车的目的(Larsson et al.,2006). ...
改进TEB算法的多机器人动态避障策略研究
1
2022
... 为了应对上述问题,研究人员提出了一种在线轨迹规划算法,即时间弹性带(TEB)方法(Rösmann et al.,2012,2013,2017),该算法已推广到一种有效的动态系统时间最优模型预测控制方法.此外,为了克服传统的本地规划器无法穿越动态障碍物的缺点,研究人员提出了在候选轨迹中切换到当前的最优轨迹,并通过构建运动模型对机器人未来状态进行预测,采用二次规划来进一步优化轨迹.陈纪廷等(2021)在传统TEB算法的基础上将障碍物聚类为凸多边形,降低了障碍物约束的计算量,提高了导航的实时性.陈奕梅等(2022)提出多机器人环境下TEB算法在动态避障时轨迹欠佳且速度输出不稳定的问题,将TEB算法与速度障碍法(VO)进行了融合,使得TEB算法在应对动态障碍物时效率更高.Smith et al.(2020)提出了egoTEB算法,通过使用以自我为中心的感知空间来表示局部代价地图,使得TEB算法在不确定环境中具有更高的稳定性.Zhang et al.(2018)提出将自动导航和自动泊车无缝集成的两阶段TEB规划算法,生成了自动驾驶汽车自动泊车所需的轨迹. ...








 甘公网安备 62010202000672号
甘公网安备 62010202000672号{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}