


由于井下无轨运输工作环境中存在着粉尘、噪音和通风困难等因素(Dragt,2006),驾驶人员依靠光电和声音等感知,在较窄的单行巷道内,难以做出正确的硐室避让、错车和会车等交通行驶决策,导致井下容易发生车辆相撞和车辆堵塞等情况,影响生产效率,且存在着较大的安全隐患。目前,国内矿山井下生产运输工段,往往采用人工开关红绿灯控制和信号灯自动控制实现井下交通运输调度和管控(吴立活,2018)。然而,随着矿山自动化水平的提高,井下生产设备的增多,堵车、撞车和频繁倒车等现象依然是导致生产效率低下、成本增高及产生重大安全隐患的主要原因。
为了解决上述问题,国内外学者分别在井下调度自动化、调度算法和智能调度系统等方面开展了相关研究。殷贵生(2013)采用嵌入Zigbee无线通信技术的RFID自动识别技术,对监控区域内的车辆进行实时监控,通过切换控制交通信号灯实现指挥调度。张社稷等(2021)采用井下光纤环网组网技术,通过车载终端、定位基站、信号灯和RFID激励器辅助定位,利用井下交通管控原则所构建的交通安全管控系统,实现了基于信号灯自动控制系统的井下会车避让管控。高峰(2011)基于神经网络专家系统所构建的井下辅助运输神经网络模型,解决了传统运输系统中存在的堵车问题。鲍久圣等(2022)基于改进后的A*-人工势场联合算法,有效提升了井下运输路径规划效率,降低了最大跟踪误差,实现了巷道内合理会车和安全避障等场景的优化。周斌等(2022)基于遗传算法设计了井下运输路径规划模型,实现了各车行驶路径最短,降低会车次数的目的。
金川二矿区1 000 m水平转运道,具有生产运输道路单一,会车避让节点有限,以及避让节点间路径较长等特点。当前已开启矿卡远程遥控驾驶和自动驾驶技术研究,后期将逐步以矿卡无人驾驶为生产主导。因此,矿区现需配套的集群智能调度系统,实现对其生产作业流程的监管与调度。为满足高精度定位和信号全覆盖的要求,传统的基于信号灯控制的井下交通自动化系统在实施过程中往往需要布置大量传感器及交通指挥设备,增加了系统复杂度和后期维护运营成本,使得实施难度增加。本文所采用的基于5G+激光雷达SLAM技术及其他辅助修正技术能够在不依托环境感知传感器的情况下,实时准确地提供井下设备同高精度地图的相对位置信息。在获取了设备与环境的相对位置关系的基础上,融合电子围栏技术和智能调度(李飞等,2021),实现对交通状况的提前感知与响应,通过调度算法模型做出精准决策,减少避让次数,缩短拥堵时间,从而提高矿山生产效率。其中,电子围栏是通过预先在生产地图上绘制的一系列封闭区域,当移动设备驶入不同被定义的区域内时,会触发预设好的相应事件,以此作为调度或监管的先决条件。该技术被广泛应用于位置信息已知或相对位置已知的基于物联网技术的监管场景(许松华,2007;徐亮,2013;张勇等,2021;惠英等,2022)。
1 智能调度系统整体架构
井下无轨设备运输巷道由于其空间设计巷宽较窄,只能允许单一方向车辆通行。因此,在一些需要双向通行的运输巷道内,对向行驶的运输车队难以顺利通行。为解决会车通行问题,矿山通常在双向通行的巷道中,设计用于错车通行的避让硐室。当车辆运输过程中出现对向会车时,根据实际生产情况实现硐室避让错车,选择合适的车队进入硐室进行避让,是井下交通管控中至关重要的一环。对运输系统车辆相对位置及生产状态的整体把控,目的是使车辆在系统中处于合理的位置,减少避让次数,从而降低巷道拥堵时间,提高生产效率,降低人员及设备安全风险。当前井下智能化运输系统的研究方向主要有井下设备无人化研究(罗维东等,2020;吴智广等,2020;王京华等,2021)、调度系统智能控制(陈忠强,2014;李朝金,2021)、运输路径规划算法(鲍久圣等,2022)及设备高精度定位技术(毕林等,2021)等。这些研究工作都是服务于交通智能控制的内容之一,特别是设备定位、数据传输和智能调度决策等技术,是井下无人运输系统构建的基础和必要条件。
地下矿智能调度系统通过5G通信基站以及由光缆、路由器、交换机和综合基站等组成的工业传输网络实现地下矿网络的全覆盖,通过即时定位与地图构建(SLAM技术)实现井下特殊环境各种车辆的实时精确定位、井下车辆地面远程驾驶和调度指挥。为井下车辆作业提供安全、高效和智能的交通控制,实现了矿山资源的优化配置,提升了井下车辆调度的信息化和智能化水平,实现了提高生产产能和绿色安全的核心目标。地下矿无人驾驶矿卡集群调度系统架构如图1所示。
图1
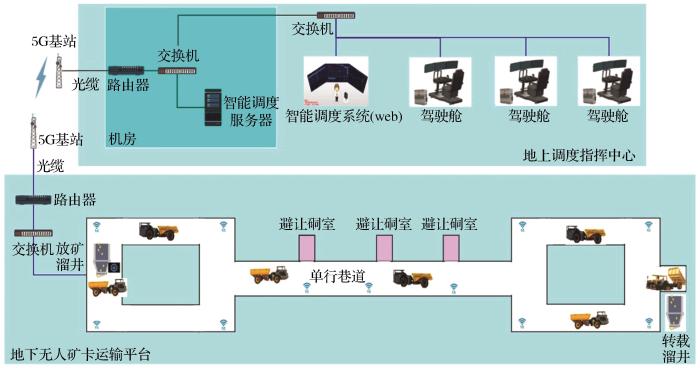
图1
地下矿无人驾驶矿卡集群调度架构图
Fig.1
Scheduling architecture diagram of underground mine unmanned mining card cluster
地下矿智能调度系统按其空间结构可划分为地上调度指挥中心和地下无人矿卡运输平台。地上调度指挥中心主要部署有调度系统服务器,以及对外数据连接接口,无人车远程驾驶舱,调度系统人机交互界面。其中,无人车远程驾驶舱配置有完备的车辆远程操控装载,是为了处理无人车自动驾驶过程中出现的系统预设情况之外的突发事件,可实现人工远程接管车辆。此外,驾驶舱还配备有监控屏幕,可调取车载摄像头上传的实时行驶状态视频。地下无人矿卡运输平台部署有5G无线通讯网络基站,位于巷道中的各类环境传感器信标,车载工控机及激光扫描传感器等多种传感器设备,远程放矿装置等设备。地上和地下设备通过工业光缆、交换机、路由器及5G基站等进行网络数据传输。系统通过5G车载客户终端设备(5G-CPE)将所有信息以无线信号传输至5G-WiFi综合基站,再通过综合基站无线级联传输至交换机以供服务器使用。
2 智能调度系统功能组成
智能调度平台采用B/S架构与服务相结合的混合方式,通信采用标准的中间件技术,因此无论是项目现场还是集团总部均可以通过Web页面进行访问,且没有并发访问限制。井下智能调度系统由井下定位技术、5G网络通讯技术、安全调度算法和用户交互系统构成。
2.1 基于SLAM技术的井下定位技术
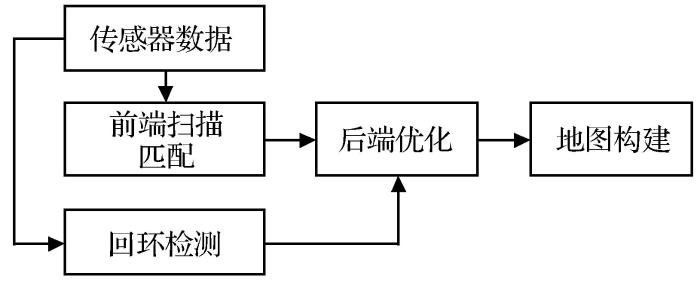
即时定位与建图(Simultaneous Localization and Mapping,SLAM)(Thrun,2008)技术通过传感器感知和测量周围环境数据信息,能够在给定参照点条件下,进行环境建图,或者结合预先构建好的环境地图计算位置。根据传感器类别,SLAM技术可划分为激光SLAM和视觉SLAM。相比视觉SLAM,激光SLAM技术更加成熟,建图精度更高,不受环境光照影响,构建的地图可用于路径规划,因此在井下环境中得到较为广泛的应用。除激光雷达之外,激光SLAM技术常结合惯性测量单元(IMU)等传感器,可计算设备角度信息和速度信息,以实现设备定位和建图过程(危双丰等,2020)。如图2所示,激光SLAM技术框架一般可分为前端扫描匹配、后端优化、闭环检测和地图构建4个模块(陈先中等,2020)。根据传感器获取的数据信息,前端扫描匹配根据相邻2帧图像之间的位姿变换关系以及初始位姿求解出较为准确的位姿和地图;后端优化模块负责较长时间范围的扫描匹配位姿优化和地图特征点优化;闭环检测模块通过对同一场景中不同运行次数进行检测,以保证构建全局地图时的统一;地图构建模块负责生成和维护全局地图。
图2
井下运输平台环境在一段时间内不会轻易发生变化。如图3所示,基于激光雷达的SLAM井下定位技术是通过激光雷达、轮速和惯性测量单元(IMU)等传感器获取终端设备自身及周围环境数据,借助环境地图中的标定点实现终端初始定位。随后对激光雷达从外界获取的环境数据进行处理,并与已经构建好的地图信息进行匹配;再结合轨迹推算及融合定位等多种算法对成功匹配结果、IMU及轮速数据进行融合,得到车辆当前位姿和位置,实现车辆定位。
图3
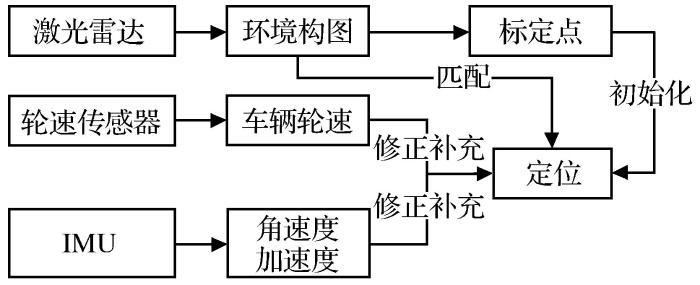
图3
基于激光SLAM技术的井下定位
Fig.3
Underground localization based on laser SLAM technology
2.2 光纤组网及5G无线网络的信息传输技术
为实现地下运输平台设备定位数据和视觉传感器数据等实时、海量信息的传输,从而在调度中心对设备运行进行决策,并完成远程控制。具体流程如下:井下设备通过传感器收集外部信息并完成设备定位,同时将位置信息和状态信息等传输至地面调度中心,调度中心通过对获取的信息进行整合分析及处理,借助相关调度算法确定具体调度内容,然后将调度信息反馈至井下设备,实时控制井下设备的运行状态。因此,信息传输要求快速、高效且能同时传输大量的信息。本文所述的智能调度系统借助光纤组网和5G无线网络实现井下设备与地上调度中心之间的信息传输。
5G无线通信技术具有高带宽、低时延和大规模设备连接等特性,可为井下车辆提供性能高、传输稳的连接网络,满足车载传感器与路测单元、控制中心的实时信息交互的通信需求,实现矿井全范围通信网络覆盖,对井下设备和环境数据进行全方位采集和传输,并实现对设备的精准可靠控制(霍振龙等,2022)。具体而言,借助5G通信技术及各类传感器设施,为车辆的精确定位、导航和避障等功能实现提供通信支持,进而在远端实时同步跟踪工作面现场场景,下达控制指令,从而实现井下运输车辆无人驾驶,实现设备及整套作业工序的智能远程实时控制。
当前信息传输系统组成按其所处位置可划分为地下和地表设备。地表设备包括核心交换机和智能调度系统服务器,地下设备包括通信基站、网络交换机、路由器和5G车载CPE等。通信基站通过无线传输与车载终端进行车地通信,从而实现调度中心与移动设备之间的数据传输。井下网络交换机以光纤作为传输介质,相互连接组成井下环形工业以太网,地面环网和井下环网通过控制中心机房的工业级核心交换机相连接,构成统一的矿井通信网络。无线通信基站安装在巷道的两侧,通过光纤接入井下环网。井下环网通过对多功能网关进行设置,与无线通信基站共同构成无线网络,实现井下巷道网络全覆盖(陈相蒙等,2020)。
2.3 基于电子围栏的交通控制技术
在金川二矿区1 000 m水平转运巷道,存在一段长约500 m、含有3个会车硐室的双向通行单车道(图4),负责连接装载工区和卸载工区。调度系统将巷道各位置点所在的区域设置为不同含义的电子围栏,同车辆位置信息进行匹配,触发相应的生产调度指令决策,对井下运输车辆进行交通控制。井下无人车主要采用激光SLAM技术完成实时定位,并建立井下运输巷道地图及生产状态检测区。
图4
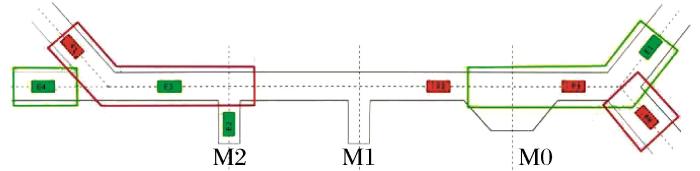
M0,M1,M2为双向通行巷道中的3个会车硐室,En表示空车(未装矿),Fm表示重车(已装矿),2种生产状态的车辆相对行驶。其中绿色与红色的实线框表示车辆检测区域电子围栏,对应空车重车驶入驶离电子围栏。当车队进入检测电子围栏内时,调度系统依据当前场景中车辆的对应位置信息下发相关决策指令。如图4所示,F1所在的红框区域为重车驶离电子围栏,E4所在的绿框区域为空车驶入电子围栏,E1所在的绿框区域为空车驶离电子围栏,F4所在的红框区域为重车驶入电子围栏。当重车驶离电子围栏内存在重车时,在空车驶入电子围栏内的空车必须停车等待;当空车驶离电子围栏内存在空车时,在重车驶入电子围栏内的重车必须停车等待。
2.4 用户交互界面系统
无人矿卡智能调度系统通过Web界面进行访问,实现人机可交互式操作模式。调度系统包含6个功能模块:实时监控、调度台、调度可视化、生产管理、设备检测和参数配置。其中,车辆定位、转运道及各生产区域相对位置信息均显示于调度可视化界面(图5),操作人员可直观地监测到转运道内各设备生产情况及各车辆相对位置。图5(a)为M2硐室后台绘制界面中的结构示意图,两侧黄色多段线闭合图形即为电子围栏,绿色区域为硐室结构示意图,调度系统依据后台绘制地图中各类特征电子围栏区域信息执行调度决策;图5(b)为M2硐室Web界面结构示意图,为避免前端界面展示的多类元素重叠杂乱,仅展示出硐室与道路结构。调度台与生产管理相结合(图6),可发布阶段性工区生产任务及各装载溜井当前料位信息,实现无人矿卡自动派车调度。实时监控界面(图7)可获取实时生产信息,包括装卸和运输等生产信息,设备状态等设备信息。设备检测功能可实现车辆轨迹回放,设备故障、超速和点检等统计报表。参数配置功能主要用于系统部署前期,依据现场实际情况进行相应参数调整,以便系统能够更好地适配场景进行运行。
图5

图5
巷道智能调度系统前端地图
(a)M2硐室后台绘制界面示意图;(b)M2硐室可视化界面示意图
Fig.5
Front-end map of roadway intelligent scheduling system
图6

图7

3 井下车辆调度算法及实现
井下无轨车辆生产运输巷道存在交叉路、会车路和弯道等复杂道路及其对应的多种交通规则。针对上述情况,研发设计了井下车辆调度系统,主要介绍车端获取的调度指令和2种巷道结构的调度算法及实现。
3.1 车端调度算法
井下巷道车道宽度较窄,弯道通行难度较大,硐室泊车轨迹复杂,装载及卸载点工作位置要求精度高。因此,无人车在井下窄巷道内行驶,采用人工驾驶并使用车载雷达录入车道轨迹线方式,再结合局部转向、转速和油压等参数进行微调,来实现无人车在复杂路况条件下,在最优路径上平稳安全行驶。
其中,调度系统通过下发3种交通指令至无人驾驶系统,通过无人驾驶系统实现对无人车在运行过程中各种调度模式的控制,避免发生安全事故及交通堵塞等情况。交通控制指令包括硐室泊车指令,即车辆收到指令后,车辆前往调度系统分配的硐室进行泊车,随后回到泊车前的行驶路径正常行驶;正常通行指令,即车辆按照录入好的轨迹线,往返于装卸载点之间,进行正常行驶;避让指令,收到该指令的车辆会执行减速并等待避让,待泊车车队完成泊车指令后,恢复正常通行。
3.2 单车道硐室会车避让算法
单车道巷道由于宽度窄,只能允许一个方向的车队通行,车道上设置硐室的目的是为了临时进行泊车避让,让另一方向的车队错车通行,从而提升生产效率。会车避让算法遵循可避让硐室解算—硐室冗余检测—车队逼近—硐室决策的逻辑进行运作(图8)。其中,车队是指同向行驶的连续空车或重车形成的车队。
图8
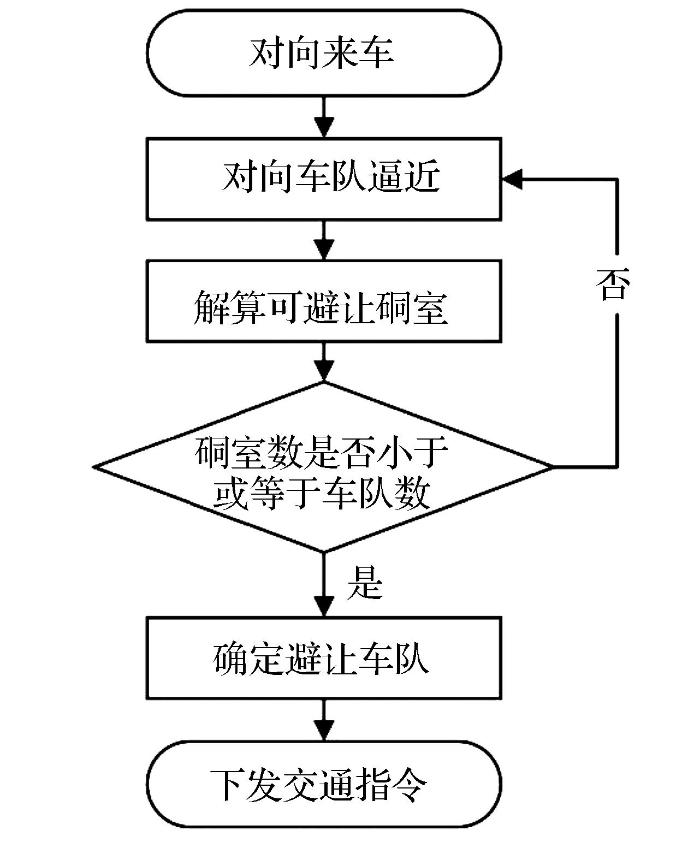
(1)可避让硐室解算及其决策
当同向行驶空车车队{E1,E2,…,En}(或重车车队{F1,F2,…,Fm}),检测到对向车队来车时,通过车辆相对位置及硐室位置,解算出位于车队与对向首车E1(或F1)中间且在安全行驶缓冲区外侧的车辆可避让硐室并按照距离首车远近进行排序,得到车队可避让硐室集合S{Mi,…,Mj}。
当S>n且S>m,即车队可避让硐室数大于双向行驶车队车数时,车队满足可避让条件,此时可避让硐室数存在冗余,2个车队继续向前行驶逼近;待车队逼近至下一检测电子围栏区域。
当S≤n或S≤m,即车队可避让硐室数小于等于其中一方车队数时,此时调度系统做出避让决策,定义该车队为避让车队,另一车队为泊车车队。根据避让车队当前位置是否位于安全行驶缓冲区,下发正常通行或等待避让指令;下发硐室泊车指令给泊车车队,进入会车硐室进行泊车。待泊车车队泊车完毕后,避让车队调度指令由等待避让更新为正常通行。
当避让车队错车驶离硐室后,若下一避让硐室或岔道出口及其外侧避让区域没有对向车队,则下发正常通行指令;若存在对向车队,则重复会车决策流程(图8),进行二次会车。待避让车队驶离硐室,硐室内泊车车队恢复执行正常通行指令。
会车决策完成后,将车队可避让硐室集合中硐与泊车车队中运输车辆集合进行匹配,将硐室集合与车队集合按元素序号依次对应,随之从硐室集合中移除;若最末车对应硐室数存在冗余,依旧选择排在首位的硐室进行泊车操作。泊车车辆按调度系统下发硐室泊车指令,前往分配好的硐室,执行泊车操作。避让车队待泊车完毕后恢复正常通行。
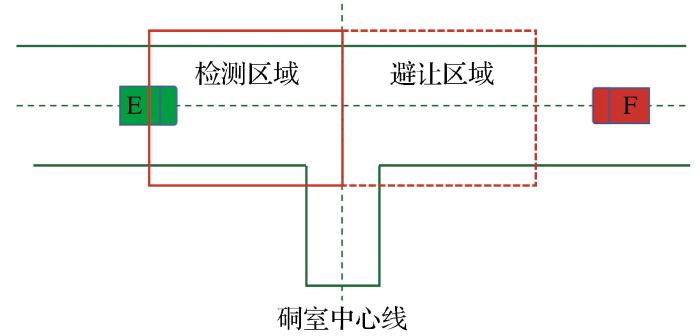
(2)让行硐室结构及避让算法
如图9所示,硐室两侧区域留有安全行驶缓冲区。对于避让的重车,设置一段避让指令响应的最短距离,形成避让区域电子围栏;对于通行的空车,设置一段最短停车等待的检测区域电子围栏,当避让车辆尚未进入硐室完成泊车前,通行车辆必须在停车等待的检测区域内停车,且不能越过避让硐室。其中,避让电子围栏和检测电子围栏以硐室中心线为边界。
图9
避让—泊车执行流程如图10所示,车辆驶入电子围栏后,通过检测自身位置和电子围栏信息,读取调度系统下发的交通指令,判断是否为避让车队。若为避让车队,执行停车等待操作;若为非避让车队,则执行硐室泊车操作,待泊车完毕后交通指令更新并停车等待。此时避让车队监听到指令更新事件,获取通行指令。若泊车车队监测硐室两侧的安全行驶缓冲区内没有其他车辆,则执行出硐通行指令,否则继续停车等待。
图10
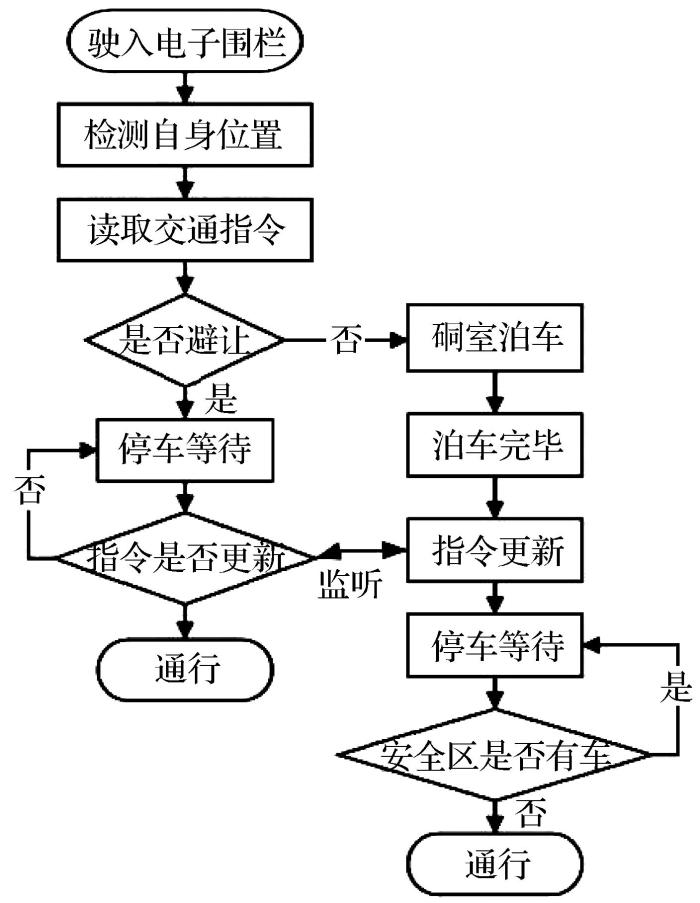
图10
避让—泊车执行流程图
Fig.10
Flow chart of the avoiding-spotting implementation of the truck
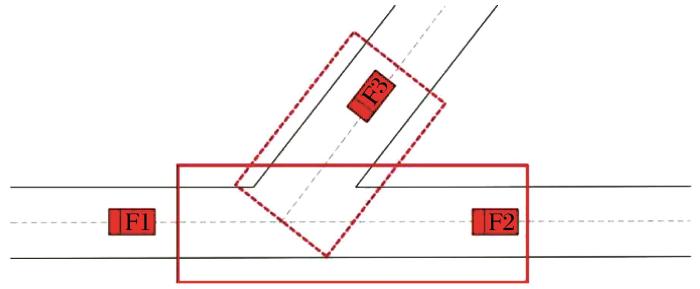
3.3 岔道口结构及会车算法
分支巷道装载完成车队并入主干巷道,如图11所示,当车辆(F3)驶入支道会车电子围栏(红色虚线框)内,即越过会车电子围栏与车道边界线后,若检测到主干会车电子围栏(红色实线框)内不存在其他车辆,则执行正常通行指令;若检测到主干会车电子围栏内已存在正常通行车辆,则执行等待避让指令,待主干会车电子围栏内车辆驶离后,恢复正常通行指令。当车辆(F2)驶入主干会车电子围栏内后,若检测到支道会车电子围栏内不存在其他车辆,则执行正常通行指令;若检测到已存在正常通行车辆,则执行等待避让指令,待支道会车电子围栏内车辆并入主干道后,恢复正常通行指令。
图11
多车道会入主车道决策流程如图12所示,当车辆驶入电子围栏后,调度系统通过检测当前车辆位置和所处电子围栏信息,获取车辆所处车道类型优先级和该车道队列位置。
图12
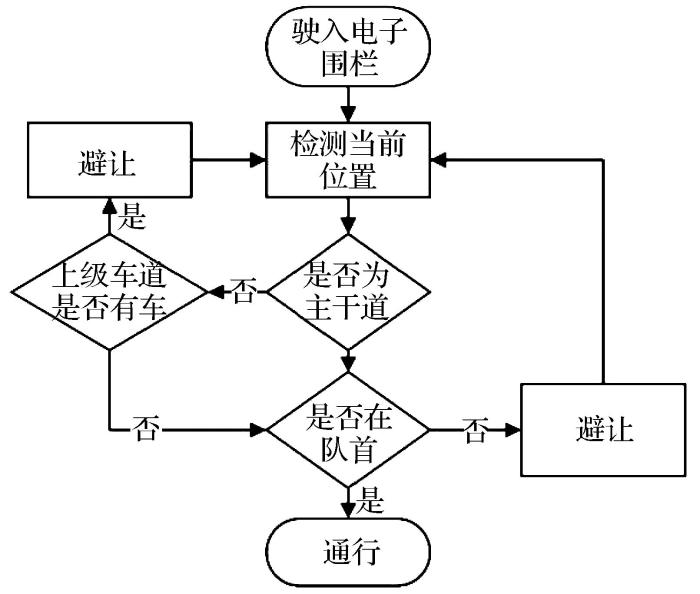
此次试验研究设置了2种类型车道,分别为主干道和支巷道,其中主干道优先级高于支巷道。相同优先级车道内,按先后驶入电子围栏时间置入对应车道队列中。当车辆位于主干道且处于主车道队列队首时,下发通行指令;当车辆位于主干道且为非队首位时,下发避让指令,并再次调用会车决策;当车辆位于非主干道时,检测上级车道是否有车,若存在车辆则下发避让指令,否则检测是否位于车道队列队首,若位于队首则下发通行指令,否则下发避让指令,同时再次调用会车决策。
4 结论
通过开展金川二矿区井下智能调度系统的部署实施工作,得到了如下结论:
(1)井下调度算法能够保证双向会车道上无人矿车的安全避让与顺利通行,有效避免了车辆运输过程中存在的安全隐患和人员风险,确保企业经济效益的平稳增长。
(2)通过建立井下无人矿车智能调度平台,实现了对井下封闭环境中无人驾驶车辆作业过程的实时监测和统筹管理,有利于提升矿产资源的高效利用,推动传统制造业的转型升级。
(3)基于激光雷达SLAM技术的井下定位技术,能够有效结合电子围栏技术与智能调度算法,实现井下无人车的自动调度及交通管控,并提供了一种地下无人矿卡智能调度系统的实践框架。
(4)金川集团二矿区井下无人驾驶智能调度系统项目的实施,充分利用了工业物联网、大数据集成和5G通信等新兴技术,在数字化矿山建设中过程中,逐步实现了井下作业无人化、自动化和智能化等目标,为资源能源型企业响应国家关于建设安全、绿色和智慧矿山的要求提供了一种可行的解决方案。
http://www.goldsci.ac.cn/article/2023/1005-2518/1005-2518-2023-31-1-133.shtml
参考文献
Underground driverless path planning of trackless rubber tyred vehicle based on improved A* and artificial potential field algorithm
[J].
Research situation and development of high-precision positioning technology for underground mine environment
[J].
Research on electric locomotive self-driving technology in coal mine
[J].
Development of millimeter wave radar imaging and SLAM in underground coal mine environment
[J].
Study on Key Technologies of Underground Metal Ore Intelligent Scheduling
[D].
Modeling and Control of an Autonomous Un‐derground Vehicle
[D].
Study on the Design Method of Coalmine Underground Auxiliaryt Ransportation System and Intelligent Scheduling
[D].
Application and development tendency of dockless bicycle-sharing geofence
[J].
R & D and demonstration application of key technologies and equipment of mine 5G wireless communication system
[J].
Automatic management and control system of underground mine ramp transportation
[J].
Application of Beidou Positioning Technology in intelligent dispatching of conta-iner terminal
[J].
Survey on underground wireless positioning system
[J].
Reactive navigation system of underground unmanned Load-Haul-Dump unit based on NMPC
[J].
Research on the Key Technology of Autonomous Positioning and Navigation of Underground Mine Stope Scraper
[D].
Simultaneous localization and mapping robotics and cognitive approaches to spatial mapping
[C]//
Obstacle detection technology of mine electric locomotive driverless based on computer vision
[J].
Survey of LiDAR-based SLAM algorithm
[J].
Positioning Technology of LHD Based on Stereo Viusal Odometry
[D].
Deand implementation of vehicle avoidance system used for sloping ramp sign of Lilou iron mine
[J].
Design and application of remote control of underground scraper based on 5G technology
[J].
Based on IOT Intelligent Community Technology Application System
[D].
Research on the Key Technology of Hazardous Materials Transport Monitor System
[D].
Application on mine ramp trackless transportation signal control system
[J].
Application of ramp transportation security control system in Jinfeng gold mine
[J].
Intelligent helmet system based on GPS+Beidou
[J].
Design of path planning for underground vehicle based on genetic algorithm
[J].
基于改进A*和人工势场算法的无轨胶轮车井下无人驾驶路径规划
[J].
矿井环境高精定位技术研究现状与发展
[J].
煤矿地下毫米波雷达点云成像与环境地图导航研究进展
[J].
煤矿电机车无人驾驶技术研究
[J].
地下金属矿智能调度关键技术研究
[D].
煤矿井下辅助运输系统设计方法与智能调度研究
[D].
共享单车电子围栏应用现状及发展前景
[J].
矿井5G无线通信系统关键技术及装备研发与示范应用
[J].
地下矿斜坡道运输自动化管控系统研究
[J].
北斗定位技术在集装箱码头智能调度中的应用
[J].
井下无线定位系统综述
[J].
基于NMPC的地下无人铲运机反应式导航系统
[J].
地下矿采场铲运机自主定位与导航关键技术研究
[D].
基于计算机视觉技术的矿井电机车无人驾驶障碍物检测技术
[J].
基于激光雷达的同时定位与地图构建方法综述
[J].
基于立体视觉里程计的地下铲运机定位技术研究
[D].
李楼铁矿斜坡道车辆避让系统设计与实施
[J].
基于5G技术的井下铲运机远程控制设计与应用
[J].
基于物联网技术应用的智慧社区应用系统实现
[D].
危险货物运输监控系统关键技术研究
[D].
矿井斜坡道无轨运输信号控制系统应用
[J].
斜坡道交通安全管控系统在锦丰金矿的应用
[J].
基于GPS+北斗的智能安全帽系统
[J].
基于遗传算法的井下车辆路径规划设计
[J].


 甘公网安备 62010202000672号
甘公网安备 62010202000672号{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}