Aiming at the problem that driving obstacles such as falling rocks or pedestrians may appear on the dim road of underground mine roadway,which seriously affects the safe driving of unmanned mine card,a fast detection optimization model RCR_YOLOv4 of roadway obstacles based on infrared vision recognition was proposed.Firstly,the infrared camera was used for data acquisition,random cutting,random flipping,mirror flipping and other methods were used to expand the experimental data set.Labeling software was used for data Labeling,and the infrared obstacle data set of mine roadway was built and loaded into the obstacle detection model.Secondly,K-Means ++ optimization algorithm was used to screen the prior frame size of obstacles in the roadway,and depth separable convolution was introduced to reduce the number of network parameters and computation,so as to improve the positioning accuracy and detection efficiency of obstacle targets.The dual-channel attention mechanism is designed to optimize the network feature fusion module to realize the high-precision detection of the obstacle of unmanned mine jamming.The results show that the detection accuracy of the model can reach 93.52% and the detection speed can reach 60.6 FPS.Compared with the current popular target detection networks such as Faster_RCNN,SSD and YOLOv4,RCR_YOLOv4 also shows better comprehensive performance and can provide guarantee for the safe driving of unmanned mine cards in the complex environment of mine roadway.
RUAN Shunling, DONG Lijuan, LU Caiwu, GU Qinghua. Research on Infrared Obstacle Detection of Mine Roadway Based on RCR_YOLOv4[J]. Gold Science and Technology, 2022, 30(4): 603-611 doi:10.11872/j.issn.1005-2518.2022.04.013
矿车行进障碍物快速精准检测是矿井巷道无人驾驶的关键技术之一。已有国内外学者展开相关研究:赵亮等(2021)利用激光雷达对障碍物进行检测并设计跟踪算法,对非静止状态下的障碍物进行追踪并预判障碍物的运动轨迹;陈毅等(2020)将三维激光雷达点云数据与密集深度图检测的结果进行决策级融合,减少了环境干扰对障碍物检测的影响;Cao et al.(2020)使用一种新的滤波算法和改进的多激光雷达框架下的聚类方法实现了更稳健和准确的障碍物检测。但上述研究中所采用的激光雷达易受到烟雾、粉尘的影响,信息流庞大,处理过程复杂且价格高昂。而视觉传感器具有不易受大气影响、能耗低、价格低廉和易部署等优点,同时它解释环境信息的过程更容易被人们理解。卢才武等(2020)根据露天矿特有地理环境下的障碍物特点改进Mask R-CNN(He et al.,2017)检测框架,最终达到扩大感受野范围和提升检测精度,利用相机和深度学习方法对露天矿区障碍物进行检测;Li et al.(2020)使用一种感兴趣区域提取算法处理疑似障碍物区域,并采用CNN模型对提取的候选框区域特征图进行分类,可以有效地检测野外障碍物;Zhang et al.(2019)采用雷达与深度学习相结合的方法先确定障碍物的大致位置,然后使用RCNN算法对障碍物进行精确的定位和识别,但检测速度较慢,无法满足无人驾驶车辆行驶中对障碍物实时检测的要求。
综上所述,依据矿井特殊场景下巷道障碍物的特点,提出通过改进YOLOv4(Bochkovskiy et al.,2020)网络模型对矿井巷道障碍物进行智能识别和检测,为矿井巷道复杂环境下无人矿卡安全作业提供保障。
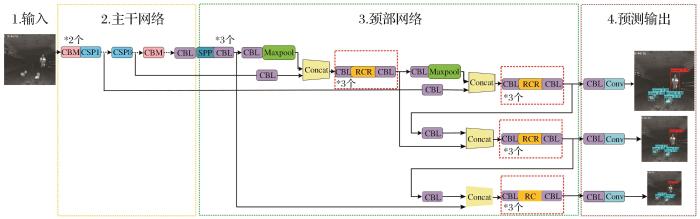
Fig.1
RCR-YOLOv4 network structure of roadway obstacle detection model
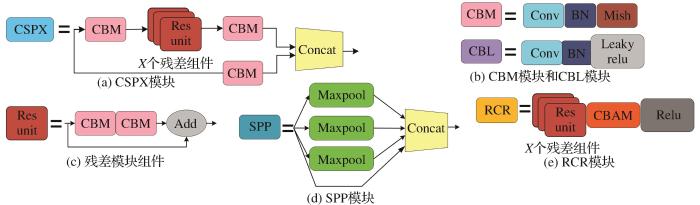
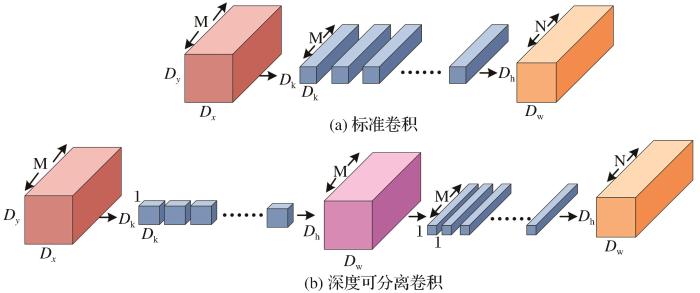
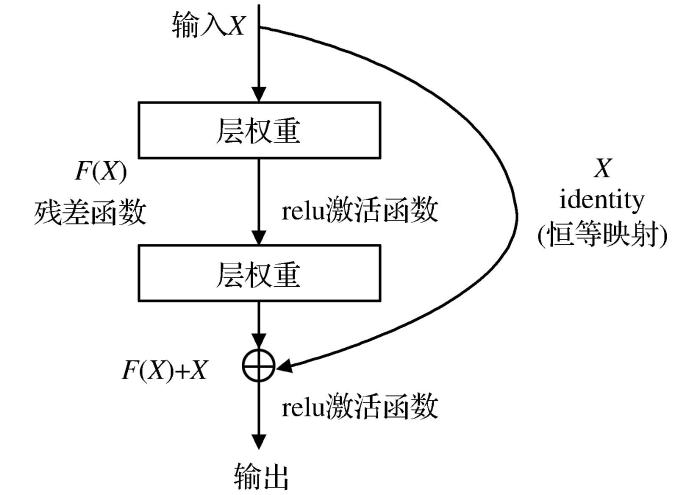
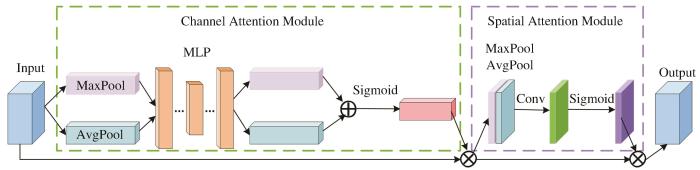
为了提升矿井巷道障碍物检测的实时性,对YOLOv4的多层卷积核主干网络进行优化,并采用深度可分离卷积(Howard et al.,2017)优化其计算参数量。同时,为了提升检测模型的检测精度和总体性能,设计了一种将残差模块(Residual)(He et al.,2016)与卷积注意力机制模块(CBAM)(Woo et al.,2018)相融合的RCR(Resunit CBAM Relu)模块(图2),并将其嵌入到网络的特征融合阶段,解决由于网络过深所引起的梯度消失问题,从而减轻网络中的干扰信息,提高障碍物特征提取能力和对小目标检测的敏感度。
... 由于YOLOv4标准模型的Anchor Box(Zhong et al.,2020)并不适用于矿井巷道障碍物检测,提出采用K-Means(Arthur et al.,2006)聚类优化算法对巷道障碍物数据集的锚框进行重新构建,并对初始点选取进行优化,提升模型的检测性能.聚类中心的距离定义为: ...
Identification research on the miner’s safety helmet wear based on convolutional neural network
0
2017
Yolov4:Optimal speed and accuracy of object detection
2
2020
... 综上所述,依据矿井特殊场景下巷道障碍物的特点,提出通过改进YOLOv4(Bochkovskiy et al.,2020)网络模型对矿井巷道障碍物进行智能识别和检测,为矿井巷道复杂环境下无人矿卡安全作业提供保障. ...
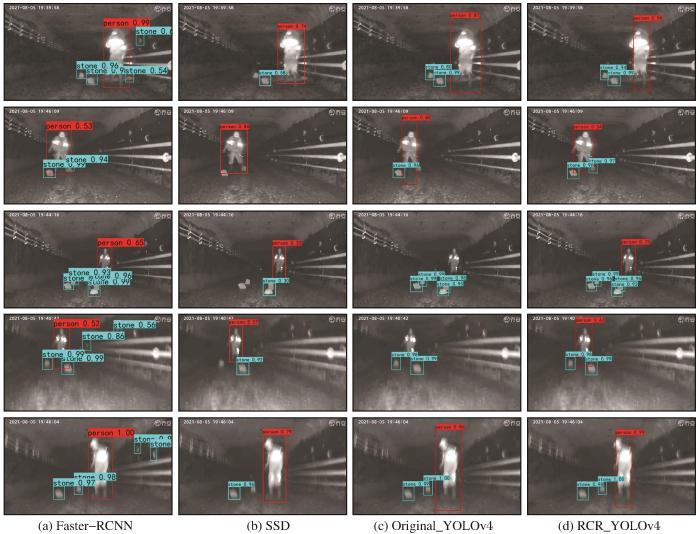
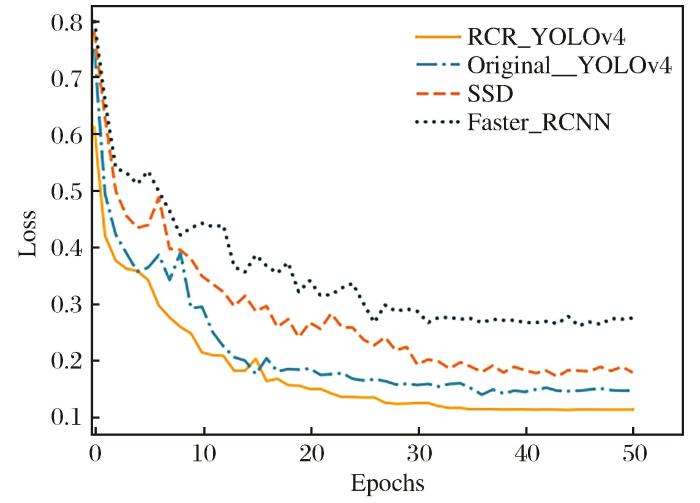
... 为了验证检测模型优化后的有效性,分别使用Faster_RCNN(Ren et al.,2017)、SSD(Liu et al.,2016)、Original_YOLOv4(Bochkovskiy et al.,2020)和优化模型RCR_YOLOv4对相同的测试数据集进行障碍物检测试验,结果如图8所示. ...
Obstacle detection for autonomous driving vehicles with multi-lidar sensor fusion
1
2020
... 矿车行进障碍物快速精准检测是矿井巷道无人驾驶的关键技术之一.已有国内外学者展开相关研究:赵亮等(2021)利用激光雷达对障碍物进行检测并设计跟踪算法,对非静止状态下的障碍物进行追踪并预判障碍物的运动轨迹;陈毅等(2020)将三维激光雷达点云数据与密集深度图检测的结果进行决策级融合,减少了环境干扰对障碍物检测的影响;Cao et al.(2020)使用一种新的滤波算法和改进的多激光雷达框架下的聚类方法实现了更稳健和准确的障碍物检测.但上述研究中所采用的激光雷达易受到烟雾、粉尘的影响,信息流庞大,处理过程复杂且价格高昂.而视觉传感器具有不易受大气影响、能耗低、价格低廉和易部署等优点,同时它解释环境信息的过程更容易被人们理解.卢才武等(2020)根据露天矿特有地理环境下的障碍物特点改进Mask R-CNN(He et al.,2017)检测框架,最终达到扩大感受野范围和提升检测精度,利用相机和深度学习方法对露天矿区障碍物进行检测;Li et al.(2020)使用一种感兴趣区域提取算法处理疑似障碍物区域,并采用CNN模型对提取的候选框区域特征图进行分类,可以有效地检测野外障碍物;Zhang et al.(2019)采用雷达与深度学习相结合的方法先确定障碍物的大致位置,然后使用RCNN算法对障碍物进行精确的定位和识别,但检测速度较慢,无法满足无人驾驶车辆行驶中对障碍物实时检测的要求. ...
Vehicle detection algorithm based on information fusion of LIDAR and camera
0
2020
Research on application of YOLOv4 object detection algorithm in monitoring on masks wearing of coal miners
0
2021
Mask r-cnn
1
2017
... 矿车行进障碍物快速精准检测是矿井巷道无人驾驶的关键技术之一.已有国内外学者展开相关研究:赵亮等(2021)利用激光雷达对障碍物进行检测并设计跟踪算法,对非静止状态下的障碍物进行追踪并预判障碍物的运动轨迹;陈毅等(2020)将三维激光雷达点云数据与密集深度图检测的结果进行决策级融合,减少了环境干扰对障碍物检测的影响;Cao et al.(2020)使用一种新的滤波算法和改进的多激光雷达框架下的聚类方法实现了更稳健和准确的障碍物检测.但上述研究中所采用的激光雷达易受到烟雾、粉尘的影响,信息流庞大,处理过程复杂且价格高昂.而视觉传感器具有不易受大气影响、能耗低、价格低廉和易部署等优点,同时它解释环境信息的过程更容易被人们理解.卢才武等(2020)根据露天矿特有地理环境下的障碍物特点改进Mask R-CNN(He et al.,2017)检测框架,最终达到扩大感受野范围和提升检测精度,利用相机和深度学习方法对露天矿区障碍物进行检测;Li et al.(2020)使用一种感兴趣区域提取算法处理疑似障碍物区域,并采用CNN模型对提取的候选框区域特征图进行分类,可以有效地检测野外障碍物;Zhang et al.(2019)采用雷达与深度学习相结合的方法先确定障碍物的大致位置,然后使用RCNN算法对障碍物进行精确的定位和识别,但检测速度较慢,无法满足无人驾驶车辆行驶中对障碍物实时检测的要求. ...
Deep residual learning for image recognition
1
2016
... 为了提升矿井巷道障碍物检测的实时性,对YOLOv4的多层卷积核主干网络进行优化,并采用深度可分离卷积(Howard et al.,2017)优化其计算参数量.同时,为了提升检测模型的检测精度和总体性能,设计了一种将残差模块(Residual)(He et al.,2016)与卷积注意力机制模块(CBAM)(Woo et al.,2018)相融合的RCR(Resunit CBAM Relu)模块(图2),并将其嵌入到网络的特征融合阶段,解决由于网络过深所引起的梯度消失问题,从而减轻网络中的干扰信息,提高障碍物特征提取能力和对小目标检测的敏感度. ...
Mobilenets:Efficient convolutional neural networks for mobile vision applications
1
2017
... 为了提升矿井巷道障碍物检测的实时性,对YOLOv4的多层卷积核主干网络进行优化,并采用深度可分离卷积(Howard et al.,2017)优化其计算参数量.同时,为了提升检测模型的检测精度和总体性能,设计了一种将残差模块(Residual)(He et al.,2016)与卷积注意力机制模块(CBAM)(Woo et al.,2018)相融合的RCR(Resunit CBAM Relu)模块(图2),并将其嵌入到网络的特征融合阶段,解决由于网络过深所引起的梯度消失问题,从而减轻网络中的干扰信息,提高障碍物特征提取能力和对小目标检测的敏感度. ...
Obstacle detection in a field environment based on a convolutional neural network security
1
2020
... 矿车行进障碍物快速精准检测是矿井巷道无人驾驶的关键技术之一.已有国内外学者展开相关研究:赵亮等(2021)利用激光雷达对障碍物进行检测并设计跟踪算法,对非静止状态下的障碍物进行追踪并预判障碍物的运动轨迹;陈毅等(2020)将三维激光雷达点云数据与密集深度图检测的结果进行决策级融合,减少了环境干扰对障碍物检测的影响;Cao et al.(2020)使用一种新的滤波算法和改进的多激光雷达框架下的聚类方法实现了更稳健和准确的障碍物检测.但上述研究中所采用的激光雷达易受到烟雾、粉尘的影响,信息流庞大,处理过程复杂且价格高昂.而视觉传感器具有不易受大气影响、能耗低、价格低廉和易部署等优点,同时它解释环境信息的过程更容易被人们理解.卢才武等(2020)根据露天矿特有地理环境下的障碍物特点改进Mask R-CNN(He et al.,2017)检测框架,最终达到扩大感受野范围和提升检测精度,利用相机和深度学习方法对露天矿区障碍物进行检测;Li et al.(2020)使用一种感兴趣区域提取算法处理疑似障碍物区域,并采用CNN模型对提取的候选框区域特征图进行分类,可以有效地检测野外障碍物;Zhang et al.(2019)采用雷达与深度学习相结合的方法先确定障碍物的大致位置,然后使用RCNN算法对障碍物进行精确的定位和识别,但检测速度较慢,无法满足无人驾驶车辆行驶中对障碍物实时检测的要求. ...
Ssd:Single shot multibox detector
1
2016
... 为了验证检测模型优化后的有效性,分别使用Faster_RCNN(Ren et al.,2017)、SSD(Liu et al.,2016)、Original_YOLOv4(Bochkovskiy et al.,2020)和优化模型RCR_YOLOv4对相同的测试数据集进行障碍物检测试验,结果如图8所示. ...
An open-pit mine roadway obstacle warning method intergrating the object detection and distance threshold model
0
2020
A new safety management model of intelligent mines in 5G era
0
2021
Faster r-cnn:Towards real-time object detection with region proposal networks
1
2017
... 为了验证检测模型优化后的有效性,分别使用Faster_RCNN(Ren et al.,2017)、SSD(Liu et al.,2016)、Original_YOLOv4(Bochkovskiy et al.,2020)和优化模型RCR_YOLOv4对相同的测试数据集进行障碍物检测试验,结果如图8所示. ...
Road negative obstacle detection in open-pit mines based on multi scale feature fusion
0
2021
Obstacle detection technology of mine electric locomotive driverless based on computer vision technology
0
2021
Cbam:Convolutional block attention module
1
2018
... 为了提升矿井巷道障碍物检测的实时性,对YOLOv4的多层卷积核主干网络进行优化,并采用深度可分离卷积(Howard et al.,2017)优化其计算参数量.同时,为了提升检测模型的检测精度和总体性能,设计了一种将残差模块(Residual)(He et al.,2016)与卷积注意力机制模块(CBAM)(Woo et al.,2018)相融合的RCR(Resunit CBAM Relu)模块(图2),并将其嵌入到网络的特征融合阶段,解决由于网络过深所引起的梯度消失问题,从而减轻网络中的干扰信息,提高障碍物特征提取能力和对小目标检测的敏感度. ...
Radar and vision fusion for the real-time obstacle detection and identification
1
2019
... 矿车行进障碍物快速精准检测是矿井巷道无人驾驶的关键技术之一.已有国内外学者展开相关研究:赵亮等(2021)利用激光雷达对障碍物进行检测并设计跟踪算法,对非静止状态下的障碍物进行追踪并预判障碍物的运动轨迹;陈毅等(2020)将三维激光雷达点云数据与密集深度图检测的结果进行决策级融合,减少了环境干扰对障碍物检测的影响;Cao et al.(2020)使用一种新的滤波算法和改进的多激光雷达框架下的聚类方法实现了更稳健和准确的障碍物检测.但上述研究中所采用的激光雷达易受到烟雾、粉尘的影响,信息流庞大,处理过程复杂且价格高昂.而视觉传感器具有不易受大气影响、能耗低、价格低廉和易部署等优点,同时它解释环境信息的过程更容易被人们理解.卢才武等(2020)根据露天矿特有地理环境下的障碍物特点改进Mask R-CNN(He et al.,2017)检测框架,最终达到扩大感受野范围和提升检测精度,利用相机和深度学习方法对露天矿区障碍物进行检测;Li et al.(2020)使用一种感兴趣区域提取算法处理疑似障碍物区域,并采用CNN模型对提取的候选框区域特征图进行分类,可以有效地检测野外障碍物;Zhang et al.(2019)采用雷达与深度学习相结合的方法先确定障碍物的大致位置,然后使用RCNN算法对障碍物进行精确的定位和识别,但检测速度较慢,无法满足无人驾驶车辆行驶中对障碍物实时检测的要求. ...
Semantic segmentation based deep learning algorithm for 3D object detection from point clouds
0
2021
Anchor box optimization for object detection
1
2020
... 由于YOLOv4标准模型的Anchor Box(Zhong et al.,2020)并不适用于矿井巷道障碍物检测,提出采用K-Means(Arthur et al.,2006)聚类优化算法对巷道障碍物数据集的锚框进行重新构建,并对初始点选取进行优化,提升模型的检测性能.聚类中心的距离定义为: ...
... 矿车行进障碍物快速精准检测是矿井巷道无人驾驶的关键技术之一.已有国内外学者展开相关研究:赵亮等(2021)利用激光雷达对障碍物进行检测并设计跟踪算法,对非静止状态下的障碍物进行追踪并预判障碍物的运动轨迹;陈毅等(2020)将三维激光雷达点云数据与密集深度图检测的结果进行决策级融合,减少了环境干扰对障碍物检测的影响;Cao et al.(2020)使用一种新的滤波算法和改进的多激光雷达框架下的聚类方法实现了更稳健和准确的障碍物检测.但上述研究中所采用的激光雷达易受到烟雾、粉尘的影响,信息流庞大,处理过程复杂且价格高昂.而视觉传感器具有不易受大气影响、能耗低、价格低廉和易部署等优点,同时它解释环境信息的过程更容易被人们理解.卢才武等(2020)根据露天矿特有地理环境下的障碍物特点改进Mask R-CNN(He et al.,2017)检测框架,最终达到扩大感受野范围和提升检测精度,利用相机和深度学习方法对露天矿区障碍物进行检测;Li et al.(2020)使用一种感兴趣区域提取算法处理疑似障碍物区域,并采用CNN模型对提取的候选框区域特征图进行分类,可以有效地检测野外障碍物;Zhang et al.(2019)采用雷达与深度学习相结合的方法先确定障碍物的大致位置,然后使用RCNN算法对障碍物进行精确的定位和识别,但检测速度较慢,无法满足无人驾驶车辆行驶中对障碍物实时检测的要求. ...
... 矿车行进障碍物快速精准检测是矿井巷道无人驾驶的关键技术之一.已有国内外学者展开相关研究:赵亮等(2021)利用激光雷达对障碍物进行检测并设计跟踪算法,对非静止状态下的障碍物进行追踪并预判障碍物的运动轨迹;陈毅等(2020)将三维激光雷达点云数据与密集深度图检测的结果进行决策级融合,减少了环境干扰对障碍物检测的影响;Cao et al.(2020)使用一种新的滤波算法和改进的多激光雷达框架下的聚类方法实现了更稳健和准确的障碍物检测.但上述研究中所采用的激光雷达易受到烟雾、粉尘的影响,信息流庞大,处理过程复杂且价格高昂.而视觉传感器具有不易受大气影响、能耗低、价格低廉和易部署等优点,同时它解释环境信息的过程更容易被人们理解.卢才武等(2020)根据露天矿特有地理环境下的障碍物特点改进Mask R-CNN(He et al.,2017)检测框架,最终达到扩大感受野范围和提升检测精度,利用相机和深度学习方法对露天矿区障碍物进行检测;Li et al.(2020)使用一种感兴趣区域提取算法处理疑似障碍物区域,并采用CNN模型对提取的候选框区域特征图进行分类,可以有效地检测野外障碍物;Zhang et al.(2019)采用雷达与深度学习相结合的方法先确定障碍物的大致位置,然后使用RCNN算法对障碍物进行精确的定位和识别,但检测速度较慢,无法满足无人驾驶车辆行驶中对障碍物实时检测的要求. ...
... 矿车行进障碍物快速精准检测是矿井巷道无人驾驶的关键技术之一.已有国内外学者展开相关研究:赵亮等(2021)利用激光雷达对障碍物进行检测并设计跟踪算法,对非静止状态下的障碍物进行追踪并预判障碍物的运动轨迹;陈毅等(2020)将三维激光雷达点云数据与密集深度图检测的结果进行决策级融合,减少了环境干扰对障碍物检测的影响;Cao et al.(2020)使用一种新的滤波算法和改进的多激光雷达框架下的聚类方法实现了更稳健和准确的障碍物检测.但上述研究中所采用的激光雷达易受到烟雾、粉尘的影响,信息流庞大,处理过程复杂且价格高昂.而视觉传感器具有不易受大气影响、能耗低、价格低廉和易部署等优点,同时它解释环境信息的过程更容易被人们理解.卢才武等(2020)根据露天矿特有地理环境下的障碍物特点改进Mask R-CNN(He et al.,2017)检测框架,最终达到扩大感受野范围和提升检测精度,利用相机和深度学习方法对露天矿区障碍物进行检测;Li et al.(2020)使用一种感兴趣区域提取算法处理疑似障碍物区域,并采用CNN模型对提取的候选框区域特征图进行分类,可以有效地检测野外障碍物;Zhang et al.(2019)采用雷达与深度学习相结合的方法先确定障碍物的大致位置,然后使用RCNN算法对障碍物进行精确的定位和识别,但检测速度较慢,无法满足无人驾驶车辆行驶中对障碍物实时检测的要求. ...





 甘公网安备 62010202000672号
甘公网安备 62010202000672号{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}