Mine-Loading Measurement System of Underground Locomotive Based on Image Recognition
ZHANG Yupeng,, WU Fuji, GUO Yi
Nonferrous Metal Mining and Metallurgy Equipment Work Design Center,Ganzhou Nonferrous Metallurgy Research Institute Co. ,Ltd. ,Ganzhou 341000,Jiangxi,China
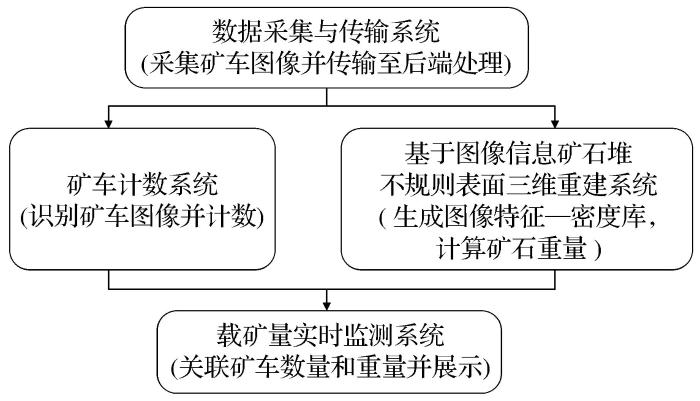
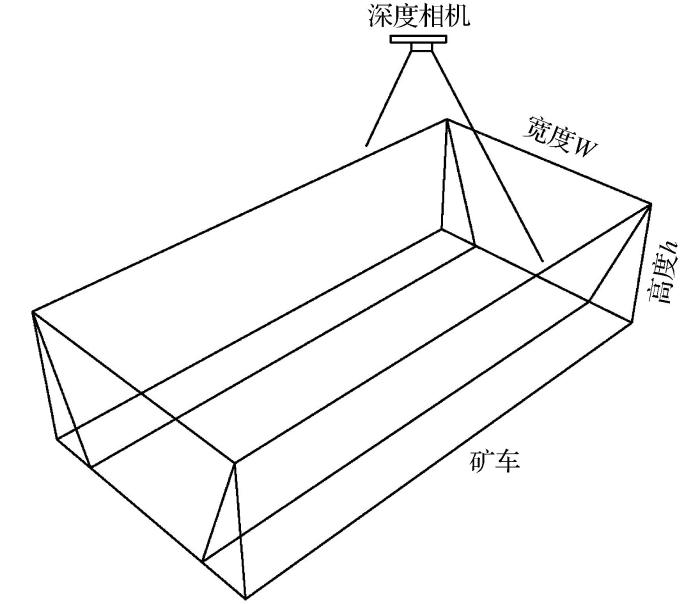
The ore yield is an important standard for mining enterprises to formulate production plans.At present,the vast majority of underground mines estimate ore yield by manually counting the number of ore carrying vehicles.The measurement error is large,which seriously affects the enterprises to formulate production plans.In order to solve the problem of large measurement error and improve the accuracy of ore yield estimation,a set of underground machine on-board ore yield measurement system based on image recognition was designed and developed in this paper.In this paper,the method of image recognition combined with density model modeling was used to form a volume model through three-dimensional reconstruction of ore pile image information,and an image feature density library was built to form a complete set of underground machine on-board ore quantity measurement system.The system collects the internal image of the locomotive ore bucket through the depth camera,then extracts the feature information of the image and compares it with the image feature density library to obtain the density of the ore in the current ore bucket, and then generates a volume model from the three-dimensional reconstruction of the image to calculate the volume of the ore pile,and calculates the product of the volume and density of the ore pile to obtain the weight of the ore pile.The field repeated tests show that the metering system operates stably and reliably,and the calculation error of locomotive ore load is less than 5%.It solves the problem of ore yield estimation in mining enterprises,improves the calculation accuracy of ore yield,and brings detailed and reliable data for enterprises to formulate production plans.
Keywords:image recognition
;
3D reconstruction
;
density model
;
measurement system
;
underground locomotive
;
ore yield
ZHANG Yupeng, WU Fuji, GUO Yi. Mine-Loading Measurement System of Underground Locomotive Based on Image Recognition[J]. Gold Science and Technology, 2022, 30(1): 131-140 doi:10.11872/j.issn.1005-2518.2022.01.135
为解决上述问题,通过查阅相关文献资料以及开展矿山企业现场调研,了解到图像分析技术已被广泛应用于矿业领域(杜培军等,2012;陈绍杰等,2011;张泽琳等,2013)。目前,已有学者将图像分析应用于矿石计量上。如:通过数字图像处理技术分析传送皮带上的矿石图像,计算皮带上的矿石量(张建立等,2020;贺杰等,2020;田甜,2011)。Sun et al.(2021)介绍了一种基于深度学习和图像识别的矿用汽车矿石装载量检测模型,该模型适用于露天矿山。在矿石智能分选方面,Baklanova et al.(2016)介绍了矿物岩石图像识别方法和算法的发展,描述了用于确定岩石成分、颜色和形状的聚类和形态分析算法;也有学者介绍了基于机器视觉的黑钨矿石智能分选机,该分选机对矿石图像进行灰度化和降噪预处理,设置阈值分析矿石含钨量筛选出脉石(戴昌璐,2020;肖继伟,2019;王芳,2020)。王李管等(2020)介绍了一种基于深度学习的黑钨矿图像识别选矿方法,该方法具有收敛快速、所需数据集小和分类准确的优点。第旺平等(2021)介绍了智能光电选矿机的设计原理及应用场景,根据矿石的表面特征差异、解离度可选用不同的选矿技术。Zheng et al.(2015)介绍了一种基于机器视觉系统的井下煤矸石气力分选系统,推导了煤矸石气力分选的理论距离公式。在矿山智能装置方面,郭毅等(2021)介绍了一种基于图像识别技术的矿石结底智能清理装置,采用Canny算子边缘检测算法确定矿车轮廓的位置。Patel et al.(2019)介绍了一种皮带传输过程中的铁矿石品位在线预测机器视觉系统,以支持向量机回归(SVR)作为选择图像特征最优集的准则函数,提出了一种序贯前向浮动选择(SFFS)算法。Xu et al.(2020)介绍了基于机器视觉的巷道变形实时监测方法和系统,岩石实时图像由机器自动采集,以围岩变形量、速度和加速度作为动态预警指标,对巷道动态变形进行实时监测。
Methods and algorithms of image recognition for mineral rocks in the mining industry
1
2016
... 为解决上述问题,通过查阅相关文献资料以及开展矿山企业现场调研,了解到图像分析技术已被广泛应用于矿业领域(杜培军等,2012;陈绍杰等,2011;张泽琳等,2013).目前,已有学者将图像分析应用于矿石计量上.如:通过数字图像处理技术分析传送皮带上的矿石图像,计算皮带上的矿石量(张建立等,2020;贺杰等,2020;田甜,2011).Sun et al.(2021)介绍了一种基于深度学习和图像识别的矿用汽车矿石装载量检测模型,该模型适用于露天矿山.在矿石智能分选方面,Baklanova et al.(2016)介绍了矿物岩石图像识别方法和算法的发展,描述了用于确定岩石成分、颜色和形状的聚类和形态分析算法;也有学者介绍了基于机器视觉的黑钨矿石智能分选机,该分选机对矿石图像进行灰度化和降噪预处理,设置阈值分析矿石含钨量筛选出脉石(戴昌璐,2020;肖继伟,2019;王芳,2020).王李管等(2020)介绍了一种基于深度学习的黑钨矿图像识别选矿方法,该方法具有收敛快速、所需数据集小和分类准确的优点.第旺平等(2021)介绍了智能光电选矿机的设计原理及应用场景,根据矿石的表面特征差异、解离度可选用不同的选矿技术.Zheng et al.(2015)介绍了一种基于机器视觉系统的井下煤矸石气力分选系统,推导了煤矸石气力分选的理论距离公式.在矿山智能装置方面,郭毅等(2021)介绍了一种基于图像识别技术的矿石结底智能清理装置,采用Canny算子边缘检测算法确定矿车轮廓的位置.Patel et al.(2019)介绍了一种皮带传输过程中的铁矿石品位在线预测机器视觉系统,以支持向量机回归(SVR)作为选择图像特征最优集的准则函数,提出了一种序贯前向浮动选择(SFFS)算法.Xu et al.(2020)介绍了基于机器视觉的巷道变形实时监测方法和系统,岩石实时图像由机器自动采集,以围岩变形量、速度和加速度作为动态预警指标,对巷道动态变形进行实时监测. ...
Land use classification in coal mining area using remote sensing images based on multiple classifier combination
0
2011
Comprehensive application of XRT ray and image intelligent concentrator in wolframite mine
0
2020
Preconcentration and discarding technology of intelligent photoelectric dressing equipment
0
2021
Land cover change detection over mining areas based on support vector machine
0
2012
Research on intelligent cleaning device for bottom of tipping-type car based on image recognition technology
0
2021
Volume measurement of coal volume on belt conveyor based on image processing
0
2020
Optimization model of mining operation scheduling for underground metal mines
0
2017
Microscopic measurement and refreshing device for CCD camera
0
2020
On differential element method and its principle
0
2021
Research on Measurement Method of Irregular Object Volume Based on Binocular Stereo Vision
0
2019
Pedestrian detection research based on multi-feature cascade of PCA dimension reduction
0
2021
Development of a machine vision system using the support vector machine regression (SVR) algorithm for the online prediction of iron ore grades
1
2019
... 为解决上述问题,通过查阅相关文献资料以及开展矿山企业现场调研,了解到图像分析技术已被广泛应用于矿业领域(杜培军等,2012;陈绍杰等,2011;张泽琳等,2013).目前,已有学者将图像分析应用于矿石计量上.如:通过数字图像处理技术分析传送皮带上的矿石图像,计算皮带上的矿石量(张建立等,2020;贺杰等,2020;田甜,2011).Sun et al.(2021)介绍了一种基于深度学习和图像识别的矿用汽车矿石装载量检测模型,该模型适用于露天矿山.在矿石智能分选方面,Baklanova et al.(2016)介绍了矿物岩石图像识别方法和算法的发展,描述了用于确定岩石成分、颜色和形状的聚类和形态分析算法;也有学者介绍了基于机器视觉的黑钨矿石智能分选机,该分选机对矿石图像进行灰度化和降噪预处理,设置阈值分析矿石含钨量筛选出脉石(戴昌璐,2020;肖继伟,2019;王芳,2020).王李管等(2020)介绍了一种基于深度学习的黑钨矿图像识别选矿方法,该方法具有收敛快速、所需数据集小和分类准确的优点.第旺平等(2021)介绍了智能光电选矿机的设计原理及应用场景,根据矿石的表面特征差异、解离度可选用不同的选矿技术.Zheng et al.(2015)介绍了一种基于机器视觉系统的井下煤矸石气力分选系统,推导了煤矸石气力分选的理论距离公式.在矿山智能装置方面,郭毅等(2021)介绍了一种基于图像识别技术的矿石结底智能清理装置,采用Canny算子边缘检测算法确定矿车轮廓的位置.Patel et al.(2019)介绍了一种皮带传输过程中的铁矿石品位在线预测机器视觉系统,以支持向量机回归(SVR)作为选择图像特征最优集的准则函数,提出了一种序贯前向浮动选择(SFFS)算法.Xu et al.(2020)介绍了基于机器视觉的巷道变形实时监测方法和系统,岩石实时图像由机器自动采集,以围岩变形量、速度和加速度作为动态预警指标,对巷道动态变形进行实时监测. ...
Feature Extraction for hyperspectral images based on principal component analysis improved by information quantity
0
2018
A method of mining truck loading volume detection based on deep learning and image recognition
1
2021
... 为解决上述问题,通过查阅相关文献资料以及开展矿山企业现场调研,了解到图像分析技术已被广泛应用于矿业领域(杜培军等,2012;陈绍杰等,2011;张泽琳等,2013).目前,已有学者将图像分析应用于矿石计量上.如:通过数字图像处理技术分析传送皮带上的矿石图像,计算皮带上的矿石量(张建立等,2020;贺杰等,2020;田甜,2011).Sun et al.(2021)介绍了一种基于深度学习和图像识别的矿用汽车矿石装载量检测模型,该模型适用于露天矿山.在矿石智能分选方面,Baklanova et al.(2016)介绍了矿物岩石图像识别方法和算法的发展,描述了用于确定岩石成分、颜色和形状的聚类和形态分析算法;也有学者介绍了基于机器视觉的黑钨矿石智能分选机,该分选机对矿石图像进行灰度化和降噪预处理,设置阈值分析矿石含钨量筛选出脉石(戴昌璐,2020;肖继伟,2019;王芳,2020).王李管等(2020)介绍了一种基于深度学习的黑钨矿图像识别选矿方法,该方法具有收敛快速、所需数据集小和分类准确的优点.第旺平等(2021)介绍了智能光电选矿机的设计原理及应用场景,根据矿石的表面特征差异、解离度可选用不同的选矿技术.Zheng et al.(2015)介绍了一种基于机器视觉系统的井下煤矸石气力分选系统,推导了煤矸石气力分选的理论距离公式.在矿山智能装置方面,郭毅等(2021)介绍了一种基于图像识别技术的矿石结底智能清理装置,采用Canny算子边缘检测算法确定矿车轮廓的位置.Patel et al.(2019)介绍了一种皮带传输过程中的铁矿石品位在线预测机器视觉系统,以支持向量机回归(SVR)作为选择图像特征最优集的准则函数,提出了一种序贯前向浮动选择(SFFS)算法.Xu et al.(2020)介绍了基于机器视觉的巷道变形实时监测方法和系统,岩石实时图像由机器自动采集,以围岩变形量、速度和加速度作为动态预警指标,对巷道动态变形进行实时监测. ...
Coal Petrography Analysis and Coal Pile Volume Measurement Based on Image Processing Technology
0
2011
Research on Primary Selection System of Black Tungsten Ore Based on Machine Vision
0
2020
Multiple biological features recognition algorithms of underground coalmine sign-in system
0
2021
Beneficiation method of wolframite image recognition based on deep learning
0
2020
Differential element method for definite integrals
0
2020
Application of depth-image processing in vehicle identification
0
2016
Research and Design of Black Tungsten Ore Intelligent Sorting System Based on Machine Vision
0
2019
Real-time measuring and warning of surrounding rock dynamic deformation and failure in deep roadway based on machine vision method
1
2020
... 为解决上述问题,通过查阅相关文献资料以及开展矿山企业现场调研,了解到图像分析技术已被广泛应用于矿业领域(杜培军等,2012;陈绍杰等,2011;张泽琳等,2013).目前,已有学者将图像分析应用于矿石计量上.如:通过数字图像处理技术分析传送皮带上的矿石图像,计算皮带上的矿石量(张建立等,2020;贺杰等,2020;田甜,2011).Sun et al.(2021)介绍了一种基于深度学习和图像识别的矿用汽车矿石装载量检测模型,该模型适用于露天矿山.在矿石智能分选方面,Baklanova et al.(2016)介绍了矿物岩石图像识别方法和算法的发展,描述了用于确定岩石成分、颜色和形状的聚类和形态分析算法;也有学者介绍了基于机器视觉的黑钨矿石智能分选机,该分选机对矿石图像进行灰度化和降噪预处理,设置阈值分析矿石含钨量筛选出脉石(戴昌璐,2020;肖继伟,2019;王芳,2020).王李管等(2020)介绍了一种基于深度学习的黑钨矿图像识别选矿方法,该方法具有收敛快速、所需数据集小和分类准确的优点.第旺平等(2021)介绍了智能光电选矿机的设计原理及应用场景,根据矿石的表面特征差异、解离度可选用不同的选矿技术.Zheng et al.(2015)介绍了一种基于机器视觉系统的井下煤矸石气力分选系统,推导了煤矸石气力分选的理论距离公式.在矿山智能装置方面,郭毅等(2021)介绍了一种基于图像识别技术的矿石结底智能清理装置,采用Canny算子边缘检测算法确定矿车轮廓的位置.Patel et al.(2019)介绍了一种皮带传输过程中的铁矿石品位在线预测机器视觉系统,以支持向量机回归(SVR)作为选择图像特征最优集的准则函数,提出了一种序贯前向浮动选择(SFFS)算法.Xu et al.(2020)介绍了基于机器视觉的巷道变形实时监测方法和系统,岩石实时图像由机器自动采集,以围岩变形量、速度和加速度作为动态预警指标,对巷道动态变形进行实时监测. ...
Applying PCA to dimensionality reduction of image features extracted by deep learning
0
2019
Research and development of mine electric locomotive
0
2019
A method of measuring the ore carrying capacity of hopper based on depth camera
0
2019
Application of the differential element method in some integral problems
0
2020
A fast fractal image compression algorithm based on principal component
0
2018
Research on 3D model reconstruction based on deep learning
0
2021
Application of the differential element method in the volume calculation for the rotating bodies
0
2017
Detection of ore granularity based on morphological image processing
0
2020
Design of cleaning car bottom car hydraulic control system in screw type
0
2016
Estimation of density distribution of coarse coal pile by image analysis
0
2013
Underground pneumatic separation of coal and gangue with large size(≥50 mm) in green mining based on the machine vision system
1
2015
... 为解决上述问题,通过查阅相关文献资料以及开展矿山企业现场调研,了解到图像分析技术已被广泛应用于矿业领域(杜培军等,2012;陈绍杰等,2011;张泽琳等,2013).目前,已有学者将图像分析应用于矿石计量上.如:通过数字图像处理技术分析传送皮带上的矿石图像,计算皮带上的矿石量(张建立等,2020;贺杰等,2020;田甜,2011).Sun et al.(2021)介绍了一种基于深度学习和图像识别的矿用汽车矿石装载量检测模型,该模型适用于露天矿山.在矿石智能分选方面,Baklanova et al.(2016)介绍了矿物岩石图像识别方法和算法的发展,描述了用于确定岩石成分、颜色和形状的聚类和形态分析算法;也有学者介绍了基于机器视觉的黑钨矿石智能分选机,该分选机对矿石图像进行灰度化和降噪预处理,设置阈值分析矿石含钨量筛选出脉石(戴昌璐,2020;肖继伟,2019;王芳,2020).王李管等(2020)介绍了一种基于深度学习的黑钨矿图像识别选矿方法,该方法具有收敛快速、所需数据集小和分类准确的优点.第旺平等(2021)介绍了智能光电选矿机的设计原理及应用场景,根据矿石的表面特征差异、解离度可选用不同的选矿技术.Zheng et al.(2015)介绍了一种基于机器视觉系统的井下煤矸石气力分选系统,推导了煤矸石气力分选的理论距离公式.在矿山智能装置方面,郭毅等(2021)介绍了一种基于图像识别技术的矿石结底智能清理装置,采用Canny算子边缘检测算法确定矿车轮廓的位置.Patel et al.(2019)介绍了一种皮带传输过程中的铁矿石品位在线预测机器视觉系统,以支持向量机回归(SVR)作为选择图像特征最优集的准则函数,提出了一种序贯前向浮动选择(SFFS)算法.Xu et al.(2020)介绍了基于机器视觉的巷道变形实时监测方法和系统,岩石实时图像由机器自动采集,以围岩变形量、速度和加速度作为动态预警指标,对巷道动态变形进行实时监测. ...
基于多分类器集成的煤矿区土地利用遥感分类
1
2011
... 为解决上述问题,通过查阅相关文献资料以及开展矿山企业现场调研,了解到图像分析技术已被广泛应用于矿业领域(杜培军等,2012;陈绍杰等,2011;张泽琳等,2013).目前,已有学者将图像分析应用于矿石计量上.如:通过数字图像处理技术分析传送皮带上的矿石图像,计算皮带上的矿石量(张建立等,2020;贺杰等,2020;田甜,2011).Sun et al.(2021)介绍了一种基于深度学习和图像识别的矿用汽车矿石装载量检测模型,该模型适用于露天矿山.在矿石智能分选方面,Baklanova et al.(2016)介绍了矿物岩石图像识别方法和算法的发展,描述了用于确定岩石成分、颜色和形状的聚类和形态分析算法;也有学者介绍了基于机器视觉的黑钨矿石智能分选机,该分选机对矿石图像进行灰度化和降噪预处理,设置阈值分析矿石含钨量筛选出脉石(戴昌璐,2020;肖继伟,2019;王芳,2020).王李管等(2020)介绍了一种基于深度学习的黑钨矿图像识别选矿方法,该方法具有收敛快速、所需数据集小和分类准确的优点.第旺平等(2021)介绍了智能光电选矿机的设计原理及应用场景,根据矿石的表面特征差异、解离度可选用不同的选矿技术.Zheng et al.(2015)介绍了一种基于机器视觉系统的井下煤矸石气力分选系统,推导了煤矸石气力分选的理论距离公式.在矿山智能装置方面,郭毅等(2021)介绍了一种基于图像识别技术的矿石结底智能清理装置,采用Canny算子边缘检测算法确定矿车轮廓的位置.Patel et al.(2019)介绍了一种皮带传输过程中的铁矿石品位在线预测机器视觉系统,以支持向量机回归(SVR)作为选择图像特征最优集的准则函数,提出了一种序贯前向浮动选择(SFFS)算法.Xu et al.(2020)介绍了基于机器视觉的巷道变形实时监测方法和系统,岩石实时图像由机器自动采集,以围岩变形量、速度和加速度作为动态预警指标,对巷道动态变形进行实时监测. ...
XRT射线及图像智能选矿机在黑钨矿山的综合运用探索
1
2020
... 为解决上述问题,通过查阅相关文献资料以及开展矿山企业现场调研,了解到图像分析技术已被广泛应用于矿业领域(杜培军等,2012;陈绍杰等,2011;张泽琳等,2013).目前,已有学者将图像分析应用于矿石计量上.如:通过数字图像处理技术分析传送皮带上的矿石图像,计算皮带上的矿石量(张建立等,2020;贺杰等,2020;田甜,2011).Sun et al.(2021)介绍了一种基于深度学习和图像识别的矿用汽车矿石装载量检测模型,该模型适用于露天矿山.在矿石智能分选方面,Baklanova et al.(2016)介绍了矿物岩石图像识别方法和算法的发展,描述了用于确定岩石成分、颜色和形状的聚类和形态分析算法;也有学者介绍了基于机器视觉的黑钨矿石智能分选机,该分选机对矿石图像进行灰度化和降噪预处理,设置阈值分析矿石含钨量筛选出脉石(戴昌璐,2020;肖继伟,2019;王芳,2020).王李管等(2020)介绍了一种基于深度学习的黑钨矿图像识别选矿方法,该方法具有收敛快速、所需数据集小和分类准确的优点.第旺平等(2021)介绍了智能光电选矿机的设计原理及应用场景,根据矿石的表面特征差异、解离度可选用不同的选矿技术.Zheng et al.(2015)介绍了一种基于机器视觉系统的井下煤矸石气力分选系统,推导了煤矸石气力分选的理论距离公式.在矿山智能装置方面,郭毅等(2021)介绍了一种基于图像识别技术的矿石结底智能清理装置,采用Canny算子边缘检测算法确定矿车轮廓的位置.Patel et al.(2019)介绍了一种皮带传输过程中的铁矿石品位在线预测机器视觉系统,以支持向量机回归(SVR)作为选择图像特征最优集的准则函数,提出了一种序贯前向浮动选择(SFFS)算法.Xu et al.(2020)介绍了基于机器视觉的巷道变形实时监测方法和系统,岩石实时图像由机器自动采集,以围岩变形量、速度和加速度作为动态预警指标,对巷道动态变形进行实时监测. ...
智能光电选矿预选抛废技术研究及应用
1
2021
... 为解决上述问题,通过查阅相关文献资料以及开展矿山企业现场调研,了解到图像分析技术已被广泛应用于矿业领域(杜培军等,2012;陈绍杰等,2011;张泽琳等,2013).目前,已有学者将图像分析应用于矿石计量上.如:通过数字图像处理技术分析传送皮带上的矿石图像,计算皮带上的矿石量(张建立等,2020;贺杰等,2020;田甜,2011).Sun et al.(2021)介绍了一种基于深度学习和图像识别的矿用汽车矿石装载量检测模型,该模型适用于露天矿山.在矿石智能分选方面,Baklanova et al.(2016)介绍了矿物岩石图像识别方法和算法的发展,描述了用于确定岩石成分、颜色和形状的聚类和形态分析算法;也有学者介绍了基于机器视觉的黑钨矿石智能分选机,该分选机对矿石图像进行灰度化和降噪预处理,设置阈值分析矿石含钨量筛选出脉石(戴昌璐,2020;肖继伟,2019;王芳,2020).王李管等(2020)介绍了一种基于深度学习的黑钨矿图像识别选矿方法,该方法具有收敛快速、所需数据集小和分类准确的优点.第旺平等(2021)介绍了智能光电选矿机的设计原理及应用场景,根据矿石的表面特征差异、解离度可选用不同的选矿技术.Zheng et al.(2015)介绍了一种基于机器视觉系统的井下煤矸石气力分选系统,推导了煤矸石气力分选的理论距离公式.在矿山智能装置方面,郭毅等(2021)介绍了一种基于图像识别技术的矿石结底智能清理装置,采用Canny算子边缘检测算法确定矿车轮廓的位置.Patel et al.(2019)介绍了一种皮带传输过程中的铁矿石品位在线预测机器视觉系统,以支持向量机回归(SVR)作为选择图像特征最优集的准则函数,提出了一种序贯前向浮动选择(SFFS)算法.Xu et al.(2020)介绍了基于机器视觉的巷道变形实时监测方法和系统,岩石实时图像由机器自动采集,以围岩变形量、速度和加速度作为动态预警指标,对巷道动态变形进行实时监测. ...
基于支持向量机的矿区土地覆盖变化检测
1
2012
... 为解决上述问题,通过查阅相关文献资料以及开展矿山企业现场调研,了解到图像分析技术已被广泛应用于矿业领域(杜培军等,2012;陈绍杰等,2011;张泽琳等,2013).目前,已有学者将图像分析应用于矿石计量上.如:通过数字图像处理技术分析传送皮带上的矿石图像,计算皮带上的矿石量(张建立等,2020;贺杰等,2020;田甜,2011).Sun et al.(2021)介绍了一种基于深度学习和图像识别的矿用汽车矿石装载量检测模型,该模型适用于露天矿山.在矿石智能分选方面,Baklanova et al.(2016)介绍了矿物岩石图像识别方法和算法的发展,描述了用于确定岩石成分、颜色和形状的聚类和形态分析算法;也有学者介绍了基于机器视觉的黑钨矿石智能分选机,该分选机对矿石图像进行灰度化和降噪预处理,设置阈值分析矿石含钨量筛选出脉石(戴昌璐,2020;肖继伟,2019;王芳,2020).王李管等(2020)介绍了一种基于深度学习的黑钨矿图像识别选矿方法,该方法具有收敛快速、所需数据集小和分类准确的优点.第旺平等(2021)介绍了智能光电选矿机的设计原理及应用场景,根据矿石的表面特征差异、解离度可选用不同的选矿技术.Zheng et al.(2015)介绍了一种基于机器视觉系统的井下煤矸石气力分选系统,推导了煤矸石气力分选的理论距离公式.在矿山智能装置方面,郭毅等(2021)介绍了一种基于图像识别技术的矿石结底智能清理装置,采用Canny算子边缘检测算法确定矿车轮廓的位置.Patel et al.(2019)介绍了一种皮带传输过程中的铁矿石品位在线预测机器视觉系统,以支持向量机回归(SVR)作为选择图像特征最优集的准则函数,提出了一种序贯前向浮动选择(SFFS)算法.Xu et al.(2020)介绍了基于机器视觉的巷道变形实时监测方法和系统,岩石实时图像由机器自动采集,以围岩变形量、速度和加速度作为动态预警指标,对巷道动态变形进行实时监测. ...
基于图像识别技术的翻斗式矿车结底智能清理装置研究
1
2021
... 为解决上述问题,通过查阅相关文献资料以及开展矿山企业现场调研,了解到图像分析技术已被广泛应用于矿业领域(杜培军等,2012;陈绍杰等,2011;张泽琳等,2013).目前,已有学者将图像分析应用于矿石计量上.如:通过数字图像处理技术分析传送皮带上的矿石图像,计算皮带上的矿石量(张建立等,2020;贺杰等,2020;田甜,2011).Sun et al.(2021)介绍了一种基于深度学习和图像识别的矿用汽车矿石装载量检测模型,该模型适用于露天矿山.在矿石智能分选方面,Baklanova et al.(2016)介绍了矿物岩石图像识别方法和算法的发展,描述了用于确定岩石成分、颜色和形状的聚类和形态分析算法;也有学者介绍了基于机器视觉的黑钨矿石智能分选机,该分选机对矿石图像进行灰度化和降噪预处理,设置阈值分析矿石含钨量筛选出脉石(戴昌璐,2020;肖继伟,2019;王芳,2020).王李管等(2020)介绍了一种基于深度学习的黑钨矿图像识别选矿方法,该方法具有收敛快速、所需数据集小和分类准确的优点.第旺平等(2021)介绍了智能光电选矿机的设计原理及应用场景,根据矿石的表面特征差异、解离度可选用不同的选矿技术.Zheng et al.(2015)介绍了一种基于机器视觉系统的井下煤矸石气力分选系统,推导了煤矸石气力分选的理论距离公式.在矿山智能装置方面,郭毅等(2021)介绍了一种基于图像识别技术的矿石结底智能清理装置,采用Canny算子边缘检测算法确定矿车轮廓的位置.Patel et al.(2019)介绍了一种皮带传输过程中的铁矿石品位在线预测机器视觉系统,以支持向量机回归(SVR)作为选择图像特征最优集的准则函数,提出了一种序贯前向浮动选择(SFFS)算法.Xu et al.(2020)介绍了基于机器视觉的巷道变形实时监测方法和系统,岩石实时图像由机器自动采集,以围岩变形量、速度和加速度作为动态预警指标,对巷道动态变形进行实时监测. ...
基于图像处理的皮带机上煤量体积计量
1
2020
... 为解决上述问题,通过查阅相关文献资料以及开展矿山企业现场调研,了解到图像分析技术已被广泛应用于矿业领域(杜培军等,2012;陈绍杰等,2011;张泽琳等,2013).目前,已有学者将图像分析应用于矿石计量上.如:通过数字图像处理技术分析传送皮带上的矿石图像,计算皮带上的矿石量(张建立等,2020;贺杰等,2020;田甜,2011).Sun et al.(2021)介绍了一种基于深度学习和图像识别的矿用汽车矿石装载量检测模型,该模型适用于露天矿山.在矿石智能分选方面,Baklanova et al.(2016)介绍了矿物岩石图像识别方法和算法的发展,描述了用于确定岩石成分、颜色和形状的聚类和形态分析算法;也有学者介绍了基于机器视觉的黑钨矿石智能分选机,该分选机对矿石图像进行灰度化和降噪预处理,设置阈值分析矿石含钨量筛选出脉石(戴昌璐,2020;肖继伟,2019;王芳,2020).王李管等(2020)介绍了一种基于深度学习的黑钨矿图像识别选矿方法,该方法具有收敛快速、所需数据集小和分类准确的优点.第旺平等(2021)介绍了智能光电选矿机的设计原理及应用场景,根据矿石的表面特征差异、解离度可选用不同的选矿技术.Zheng et al.(2015)介绍了一种基于机器视觉系统的井下煤矸石气力分选系统,推导了煤矸石气力分选的理论距离公式.在矿山智能装置方面,郭毅等(2021)介绍了一种基于图像识别技术的矿石结底智能清理装置,采用Canny算子边缘检测算法确定矿车轮廓的位置.Patel et al.(2019)介绍了一种皮带传输过程中的铁矿石品位在线预测机器视觉系统,以支持向量机回归(SVR)作为选择图像特征最优集的准则函数,提出了一种序贯前向浮动选择(SFFS)算法.Xu et al.(2020)介绍了基于机器视觉的巷道变形实时监测方法和系统,岩石实时图像由机器自动采集,以围岩变形量、速度和加速度作为动态预警指标,对巷道动态变形进行实时监测. ...
... 为解决上述问题,通过查阅相关文献资料以及开展矿山企业现场调研,了解到图像分析技术已被广泛应用于矿业领域(杜培军等,2012;陈绍杰等,2011;张泽琳等,2013).目前,已有学者将图像分析应用于矿石计量上.如:通过数字图像处理技术分析传送皮带上的矿石图像,计算皮带上的矿石量(张建立等,2020;贺杰等,2020;田甜,2011).Sun et al.(2021)介绍了一种基于深度学习和图像识别的矿用汽车矿石装载量检测模型,该模型适用于露天矿山.在矿石智能分选方面,Baklanova et al.(2016)介绍了矿物岩石图像识别方法和算法的发展,描述了用于确定岩石成分、颜色和形状的聚类和形态分析算法;也有学者介绍了基于机器视觉的黑钨矿石智能分选机,该分选机对矿石图像进行灰度化和降噪预处理,设置阈值分析矿石含钨量筛选出脉石(戴昌璐,2020;肖继伟,2019;王芳,2020).王李管等(2020)介绍了一种基于深度学习的黑钨矿图像识别选矿方法,该方法具有收敛快速、所需数据集小和分类准确的优点.第旺平等(2021)介绍了智能光电选矿机的设计原理及应用场景,根据矿石的表面特征差异、解离度可选用不同的选矿技术.Zheng et al.(2015)介绍了一种基于机器视觉系统的井下煤矸石气力分选系统,推导了煤矸石气力分选的理论距离公式.在矿山智能装置方面,郭毅等(2021)介绍了一种基于图像识别技术的矿石结底智能清理装置,采用Canny算子边缘检测算法确定矿车轮廓的位置.Patel et al.(2019)介绍了一种皮带传输过程中的铁矿石品位在线预测机器视觉系统,以支持向量机回归(SVR)作为选择图像特征最优集的准则函数,提出了一种序贯前向浮动选择(SFFS)算法.Xu et al.(2020)介绍了基于机器视觉的巷道变形实时监测方法和系统,岩石实时图像由机器自动采集,以围岩变形量、速度和加速度作为动态预警指标,对巷道动态变形进行实时监测. ...
... 为解决上述问题,通过查阅相关文献资料以及开展矿山企业现场调研,了解到图像分析技术已被广泛应用于矿业领域(杜培军等,2012;陈绍杰等,2011;张泽琳等,2013).目前,已有学者将图像分析应用于矿石计量上.如:通过数字图像处理技术分析传送皮带上的矿石图像,计算皮带上的矿石量(张建立等,2020;贺杰等,2020;田甜,2011).Sun et al.(2021)介绍了一种基于深度学习和图像识别的矿用汽车矿石装载量检测模型,该模型适用于露天矿山.在矿石智能分选方面,Baklanova et al.(2016)介绍了矿物岩石图像识别方法和算法的发展,描述了用于确定岩石成分、颜色和形状的聚类和形态分析算法;也有学者介绍了基于机器视觉的黑钨矿石智能分选机,该分选机对矿石图像进行灰度化和降噪预处理,设置阈值分析矿石含钨量筛选出脉石(戴昌璐,2020;肖继伟,2019;王芳,2020).王李管等(2020)介绍了一种基于深度学习的黑钨矿图像识别选矿方法,该方法具有收敛快速、所需数据集小和分类准确的优点.第旺平等(2021)介绍了智能光电选矿机的设计原理及应用场景,根据矿石的表面特征差异、解离度可选用不同的选矿技术.Zheng et al.(2015)介绍了一种基于机器视觉系统的井下煤矸石气力分选系统,推导了煤矸石气力分选的理论距离公式.在矿山智能装置方面,郭毅等(2021)介绍了一种基于图像识别技术的矿石结底智能清理装置,采用Canny算子边缘检测算法确定矿车轮廓的位置.Patel et al.(2019)介绍了一种皮带传输过程中的铁矿石品位在线预测机器视觉系统,以支持向量机回归(SVR)作为选择图像特征最优集的准则函数,提出了一种序贯前向浮动选择(SFFS)算法.Xu et al.(2020)介绍了基于机器视觉的巷道变形实时监测方法和系统,岩石实时图像由机器自动采集,以围岩变形量、速度和加速度作为动态预警指标,对巷道动态变形进行实时监测. ...
... 为解决上述问题,通过查阅相关文献资料以及开展矿山企业现场调研,了解到图像分析技术已被广泛应用于矿业领域(杜培军等,2012;陈绍杰等,2011;张泽琳等,2013).目前,已有学者将图像分析应用于矿石计量上.如:通过数字图像处理技术分析传送皮带上的矿石图像,计算皮带上的矿石量(张建立等,2020;贺杰等,2020;田甜,2011).Sun et al.(2021)介绍了一种基于深度学习和图像识别的矿用汽车矿石装载量检测模型,该模型适用于露天矿山.在矿石智能分选方面,Baklanova et al.(2016)介绍了矿物岩石图像识别方法和算法的发展,描述了用于确定岩石成分、颜色和形状的聚类和形态分析算法;也有学者介绍了基于机器视觉的黑钨矿石智能分选机,该分选机对矿石图像进行灰度化和降噪预处理,设置阈值分析矿石含钨量筛选出脉石(戴昌璐,2020;肖继伟,2019;王芳,2020).王李管等(2020)介绍了一种基于深度学习的黑钨矿图像识别选矿方法,该方法具有收敛快速、所需数据集小和分类准确的优点.第旺平等(2021)介绍了智能光电选矿机的设计原理及应用场景,根据矿石的表面特征差异、解离度可选用不同的选矿技术.Zheng et al.(2015)介绍了一种基于机器视觉系统的井下煤矸石气力分选系统,推导了煤矸石气力分选的理论距离公式.在矿山智能装置方面,郭毅等(2021)介绍了一种基于图像识别技术的矿石结底智能清理装置,采用Canny算子边缘检测算法确定矿车轮廓的位置.Patel et al.(2019)介绍了一种皮带传输过程中的铁矿石品位在线预测机器视觉系统,以支持向量机回归(SVR)作为选择图像特征最优集的准则函数,提出了一种序贯前向浮动选择(SFFS)算法.Xu et al.(2020)介绍了基于机器视觉的巷道变形实时监测方法和系统,岩石实时图像由机器自动采集,以围岩变形量、速度和加速度作为动态预警指标,对巷道动态变形进行实时监测. ...
... 为解决上述问题,通过查阅相关文献资料以及开展矿山企业现场调研,了解到图像分析技术已被广泛应用于矿业领域(杜培军等,2012;陈绍杰等,2011;张泽琳等,2013).目前,已有学者将图像分析应用于矿石计量上.如:通过数字图像处理技术分析传送皮带上的矿石图像,计算皮带上的矿石量(张建立等,2020;贺杰等,2020;田甜,2011).Sun et al.(2021)介绍了一种基于深度学习和图像识别的矿用汽车矿石装载量检测模型,该模型适用于露天矿山.在矿石智能分选方面,Baklanova et al.(2016)介绍了矿物岩石图像识别方法和算法的发展,描述了用于确定岩石成分、颜色和形状的聚类和形态分析算法;也有学者介绍了基于机器视觉的黑钨矿石智能分选机,该分选机对矿石图像进行灰度化和降噪预处理,设置阈值分析矿石含钨量筛选出脉石(戴昌璐,2020;肖继伟,2019;王芳,2020).王李管等(2020)介绍了一种基于深度学习的黑钨矿图像识别选矿方法,该方法具有收敛快速、所需数据集小和分类准确的优点.第旺平等(2021)介绍了智能光电选矿机的设计原理及应用场景,根据矿石的表面特征差异、解离度可选用不同的选矿技术.Zheng et al.(2015)介绍了一种基于机器视觉系统的井下煤矸石气力分选系统,推导了煤矸石气力分选的理论距离公式.在矿山智能装置方面,郭毅等(2021)介绍了一种基于图像识别技术的矿石结底智能清理装置,采用Canny算子边缘检测算法确定矿车轮廓的位置.Patel et al.(2019)介绍了一种皮带传输过程中的铁矿石品位在线预测机器视觉系统,以支持向量机回归(SVR)作为选择图像特征最优集的准则函数,提出了一种序贯前向浮动选择(SFFS)算法.Xu et al.(2020)介绍了基于机器视觉的巷道变形实时监测方法和系统,岩石实时图像由机器自动采集,以围岩变形量、速度和加速度作为动态预警指标,对巷道动态变形进行实时监测. ...
... 为解决上述问题,通过查阅相关文献资料以及开展矿山企业现场调研,了解到图像分析技术已被广泛应用于矿业领域(杜培军等,2012;陈绍杰等,2011;张泽琳等,2013).目前,已有学者将图像分析应用于矿石计量上.如:通过数字图像处理技术分析传送皮带上的矿石图像,计算皮带上的矿石量(张建立等,2020;贺杰等,2020;田甜,2011).Sun et al.(2021)介绍了一种基于深度学习和图像识别的矿用汽车矿石装载量检测模型,该模型适用于露天矿山.在矿石智能分选方面,Baklanova et al.(2016)介绍了矿物岩石图像识别方法和算法的发展,描述了用于确定岩石成分、颜色和形状的聚类和形态分析算法;也有学者介绍了基于机器视觉的黑钨矿石智能分选机,该分选机对矿石图像进行灰度化和降噪预处理,设置阈值分析矿石含钨量筛选出脉石(戴昌璐,2020;肖继伟,2019;王芳,2020).王李管等(2020)介绍了一种基于深度学习的黑钨矿图像识别选矿方法,该方法具有收敛快速、所需数据集小和分类准确的优点.第旺平等(2021)介绍了智能光电选矿机的设计原理及应用场景,根据矿石的表面特征差异、解离度可选用不同的选矿技术.Zheng et al.(2015)介绍了一种基于机器视觉系统的井下煤矸石气力分选系统,推导了煤矸石气力分选的理论距离公式.在矿山智能装置方面,郭毅等(2021)介绍了一种基于图像识别技术的矿石结底智能清理装置,采用Canny算子边缘检测算法确定矿车轮廓的位置.Patel et al.(2019)介绍了一种皮带传输过程中的铁矿石品位在线预测机器视觉系统,以支持向量机回归(SVR)作为选择图像特征最优集的准则函数,提出了一种序贯前向浮动选择(SFFS)算法.Xu et al.(2020)介绍了基于机器视觉的巷道变形实时监测方法和系统,岩石实时图像由机器自动采集,以围岩变形量、速度和加速度作为动态预警指标,对巷道动态变形进行实时监测. ...
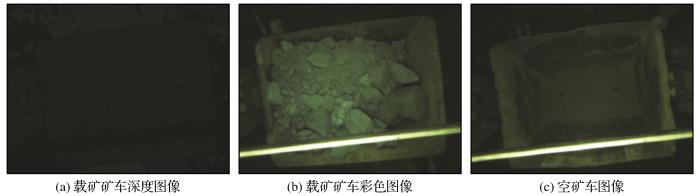
... 本次试验中每一列机车牵引8个矿车,试验共采集30列机车,共计240个矿车.每个矿车的规格是一致的,但由于各矿车的矿石结底量不同导致其空载时有重量差异(张小牛,2016).本次试验以各个空矿车重量的平均值代替空矿车的额定重量,经静态轨道衡称量各空矿车的重量后计算得出空矿车平均重量为728 kg. ...
基于图像分析的粗粒煤堆密度组成估计
2
2013
... 为解决上述问题,通过查阅相关文献资料以及开展矿山企业现场调研,了解到图像分析技术已被广泛应用于矿业领域(杜培军等,2012;陈绍杰等,2011;张泽琳等,2013).目前,已有学者将图像分析应用于矿石计量上.如:通过数字图像处理技术分析传送皮带上的矿石图像,计算皮带上的矿石量(张建立等,2020;贺杰等,2020;田甜,2011).Sun et al.(2021)介绍了一种基于深度学习和图像识别的矿用汽车矿石装载量检测模型,该模型适用于露天矿山.在矿石智能分选方面,Baklanova et al.(2016)介绍了矿物岩石图像识别方法和算法的发展,描述了用于确定岩石成分、颜色和形状的聚类和形态分析算法;也有学者介绍了基于机器视觉的黑钨矿石智能分选机,该分选机对矿石图像进行灰度化和降噪预处理,设置阈值分析矿石含钨量筛选出脉石(戴昌璐,2020;肖继伟,2019;王芳,2020).王李管等(2020)介绍了一种基于深度学习的黑钨矿图像识别选矿方法,该方法具有收敛快速、所需数据集小和分类准确的优点.第旺平等(2021)介绍了智能光电选矿机的设计原理及应用场景,根据矿石的表面特征差异、解离度可选用不同的选矿技术.Zheng et al.(2015)介绍了一种基于机器视觉系统的井下煤矸石气力分选系统,推导了煤矸石气力分选的理论距离公式.在矿山智能装置方面,郭毅等(2021)介绍了一种基于图像识别技术的矿石结底智能清理装置,采用Canny算子边缘检测算法确定矿车轮廓的位置.Patel et al.(2019)介绍了一种皮带传输过程中的铁矿石品位在线预测机器视觉系统,以支持向量机回归(SVR)作为选择图像特征最优集的准则函数,提出了一种序贯前向浮动选择(SFFS)算法.Xu et al.(2020)介绍了基于机器视觉的巷道变形实时监测方法和系统,岩石实时图像由机器自动采集,以围岩变形量、速度和加速度作为动态预警指标,对巷道动态变形进行实时监测. ...






 甘公网安备 62010202000672号
甘公网安备 62010202000672号{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}