


然而,传统提取方法需要依靠人工提取,存在效率低下的问题,如何高效自动地从DEM三维模型中提取坡面顶底线成为当前数字矿山发展亟待解决的问题。
近年来,国内外学者对DEM三维模型的特征线进行了提取(Kang et al.,2016;Cheng et al.,2018;邬群勇等,2019;Wang et al.,2015;Kang et al.,2018),但露天矿坑的特征不同于传统的DEM模型地形特征。朱庆等(2004)提出基于规则格网DEM的地形特征提取算法,但山谷特征线尺度大,数量少,与矿坑坡面顶底线特征相反,因此不能直接用于矿坑坡面顶底线的提取。陈华伟等(2019)借助图像处理中的区域分割思想提出了基于曲率突变分析的点云特征线提取方法,但该方法计算量大,且无法适应矿区地形,缺乏泛化性。Kim et al.(2017)提出了一种基于三维LiDAR传感器数据的道路特征提取方法,但道路特征线标志明显且有规律,与矿坑坡面顶底线差别很大,该研究结果不能直接用于矿坑坡面顶底线的提取。由此可知,尽管许多学者已经提出了多种从DEM三维模型中提取特征线的方法,但露天矿坑的特征与上述研究所解决的地形特征线有很大差别,因此这些研究结果不能直接用于矿坑坡面顶底线的提取。从国内外的研究现状来看,目前鲜有学者通过露天矿坑DEM三维模型自动提取坡顶底线。
鉴于此,本文提出了一种从露天矿坑DEM三维模型中自动提取坡面顶底线的方法。首先对原数据进行上采样、深度拷贝和双边滤波预处理;之后计算标准差并设定阈值,将DEM模型转化为灰度图像,对其进行梯度运算从而提取边缘像素;最后对边缘像素进行骨架提取、边缘连接和抽稀处理,并输出最终数据。
1 基于DEM的坡面顶底线自动提取
基于DEM的坡面顶底线自动提取包括原始数据预处理、初步提取(图像分割)和后续处理(提取处理)。方法处理流程如图1所示。
图1
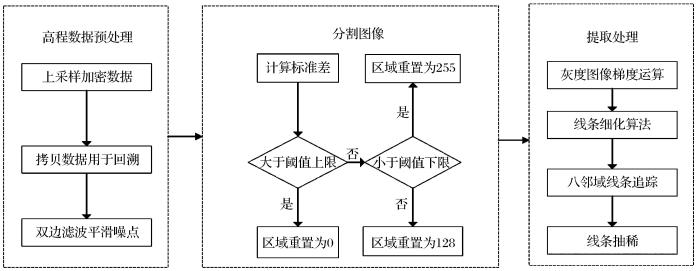
图1
基于DEM的坡面顶底线自动提取处理流程图
Fig.1
Flow chart of automatic extraction process of slope top and bottom line based on DEM
1.1 原始数据预处理
(1)上采样加密数据。在提取处理之前,需要对原始数据进行预处理。由于通过图片处理库读取的DEM三维模型尺寸较小,会影响到提取精度,因此需要用插值法对其进行上采样处理,扩大模型尺度(Fuentes et al.,2009;钟宝江等,2016)。
(2)模型数据深拷贝备份。对原数据进行上采样处理之后,由于最后需要输出的是数据的空间坐标,因此在将DEM模型转化为灰度图像之前,需要对模型数据进行深拷贝备份,最终在灰度图像中确定坡面顶底线所处的行列号,根据行列号来计算对应的备份模型数据的空间坐标,实现将灰度图像中的边缘像素行列坐标转换为模型数据的空间坐标。
1.2 初步提取处理
初步提取的核心思想是将DEM三维模型转化为灰度图像。本文提出了一种根据高程值的标准差划分图像的方法,转化后可对其采用图像处理的方法进行边缘检测,从而初步提取到坡面顶底线。针对将DEM三维模型转化为图像的问题,袁睿栋等(2018)提出了对DEM三维模型划分Delaunay三角网,再计算三角网的倾角来划分图像的方法,但该方法计算过程复杂,存在计算量大的问题。由于标准差能反映数据间的离散程度,基于此,标准差大的区域可视为坡面,标准差小的区域可视为平面。定义一个ROI区域遍历图像,根据
式中:σ为标准差;N为ROI区域内的数据量,xi为各个数据的高程值;μ为ROI区域内的高程平均值。
设定2个标准差阈值,对于当前ROI区域,若其标准差大于阈值上限,则将此区域的矩阵值重置为0;若其标准差小于阈值下限,则将此区域的矩阵值重置为255;若其标准差在阈值下限和阈值上限之间,则将此区域的矩阵值重置为128。选取某个区域的台阶,将DEM三维模型划分为灰度图像,如图2所示。
图2
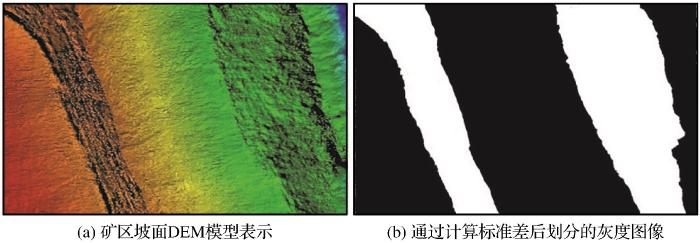
图2
图像分割处理
Fig.2
Image segmentation processing
需要注意的是,当ROI区域扫描到图像边界时,可能无法确保矩形的长和宽达到设定值,这时需要动态调整矩形的长和宽。
图3
1.3 后续处理
经过边缘检测初步提取出的坡面顶底线还存在以下3个需要后续处理的问题:一是线条宽度不是一个像素宽,即提取的坡面顶底线宽度过大;二是梯度运算的结果是孤立的边缘像素点,没有形成完整的轮廓线;三是提取的数据点密度过大。
(1)针对第一个问题,采用一种Zhang-Suen细化算法解决(Zhang et al.,2009;Chen et al.,2012)。原始的Zhang-Suen算法在本问题中存在断线和线宽不正确的问题,本文采用了一种修改的算法,将原算法的八邻域点二进制编码修改为十进制编码,作为扫描点的限制条件。算法流程如下:
第一步,记中心点为P1,其邻域的8个点顺时针绕中心点分别记为P2,P3,P4,P5,P6,P7,P8,P9,其中P2在P1的正上方。然后标记同时满足下列条件的边界点:
①2≤N(P1)≤6;
②S(P1)=1||B(P1)∈{65,5,20,80,13,22,52,133,141,54};
③P2×P4×P6=0;
④P4×P6×P8=0。
其中,N(P1)为P1的非零邻点的个数;S(P1)为以P2,P3,…,P9为序时这些点的值从0到1变化的次数;B(P1)为P1的八邻域点二进制编码对应的十进制数值。
第二步,计算过程同第一步,仅将第一步的第3个条件改为P2×P4×P8=0;第4个条件改为P2×P6×P8=0。同样,当所有边界点都扫描完毕后,将所有标记的点删除。
第三步,以上2步操作构成一次迭代,重复执行前2步直至没有点满足标记条件。
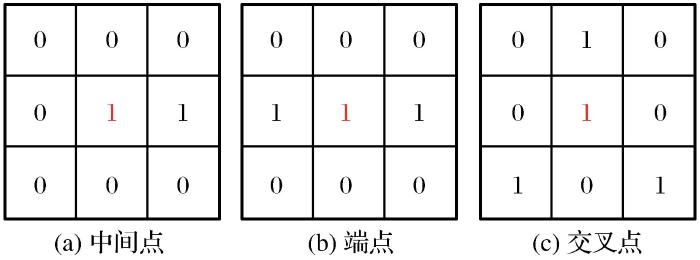
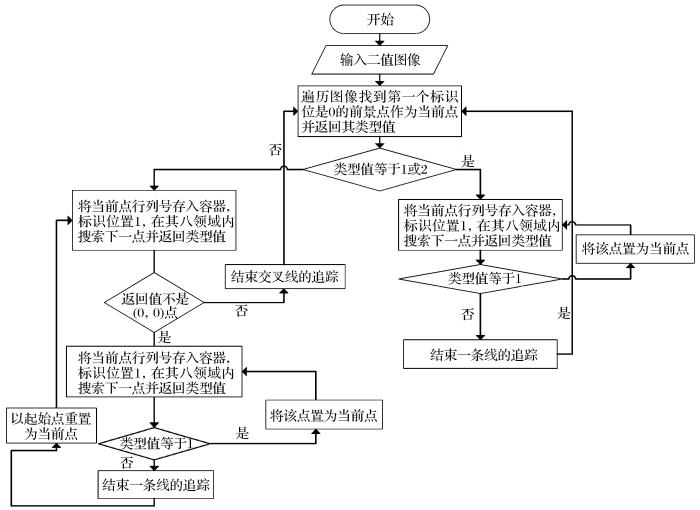
(2)针对第2个问题,设计了一种基于中心点八邻域范围的搜索算法,避免了逐行逐列搜索,减少用时。该算法将待处理的点划分为三类,即中间点、端点和交叉点,如图4所示。创建TypeMatrix类型矩阵来表示点的类型,该矩阵存储4个整形数值,即0、1、2、3。其中,0表示该点类型为背景点,不需要处理;1表示该点类型为中间点,2表示该点类型为端点,3表示该点类型为交叉点。
图4
除此之外,还需创建FlagMatrix标识矩阵来表示点是否已被查找,该矩阵存储2个整形数值,0表示该点没被查找,1表示该点已被查找。
整个连接算法被设计为3个函数,即点查找函数、线追踪函数和主处理函数。点查找函数是对于当前点,按照一定的顺序搜索其八邻域,找到第一个值为255且尚未被查找过的点并返回该点的坐标;线追踪函数是对于当前点,查找该点所属的线条,内部迭代调用点查找函数,终止条件是当前点不为端点、交叉点或(0,0)点;主处理函数负责查找所有的线条,其内部迭代调用线追踪函数。算法流程如图5所示。
图5
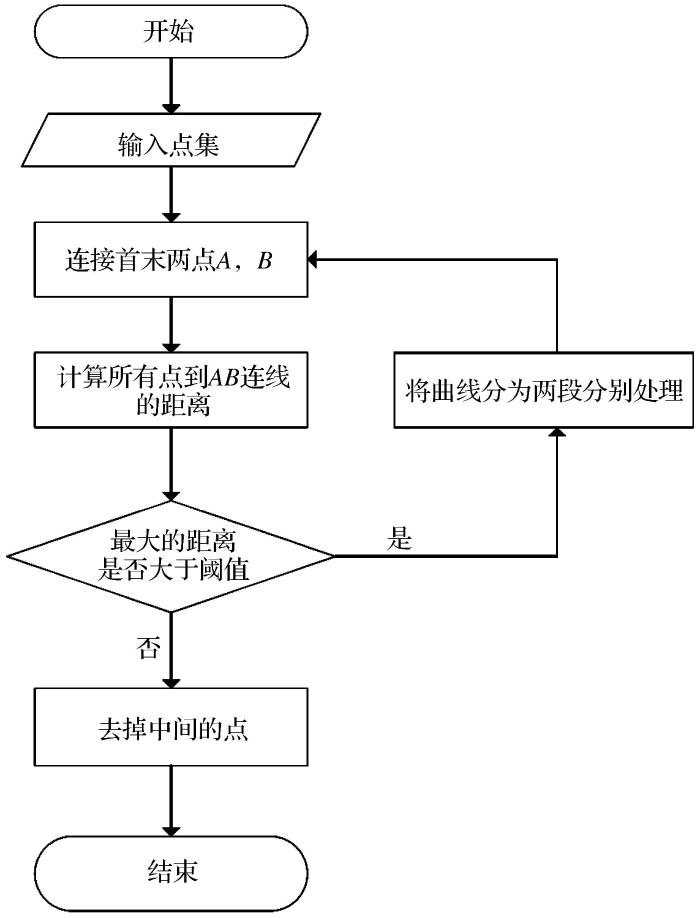
(3)针对第3个问题,采取Douglas-Peuker算法(Yu et al.,2013)解决。该算法的思想是设置一个距离阈值,当点到线的距离小于该阈值时,该点视为可以删除的点,通过不断地迭代,最后剩下的点即为最终结果。算法流程如图6所示。
图6
1.4 输出坐标
按照栅格图X方向的分辨率和Y方向的分辨率输出点的坐标,Dx表示栅格图中X方向的分辨率,Dy表示栅格图中Y方向的分辨率,Xcord表示图像左上角点的X坐标,Ycord表示图像左上角点的Y坐标,则每个点的实际坐标(x,y)计算公式为
式中:i和j分别为点的行数和列数。
2 试验与分析
2.1 数据与试验环境
本文以江铜集团某铜矿山2018年6月末的矿区实测矿坑三维模型作为试验数据。试验在普通PC(Intel Corei7/16G/Win10)环境下进行,基于OpenCV3.4.1开源库,采用C++高级编程语言进行露天矿坑DEM三维模型坡面顶底线自动提取。OpenCV开源库自3.0版本开始在运算时会自动调用其子库集成性能基元库,该库可以帮助算法在英特尔架构上实现自动优化。
2.2 可视化分析
矿区DEM三维模型、转化后的灰度图像、边缘检测结果及后续骨架提取抽稀处理得到的最终坡面顶底线如图7所示。通过计算高程值标准差,将DEM三维模型转化为灰度图像,巧妙地将原数据由三维数据转化为二维图像,使问题转化为图像处理领域经典的边缘检测任务。
图7
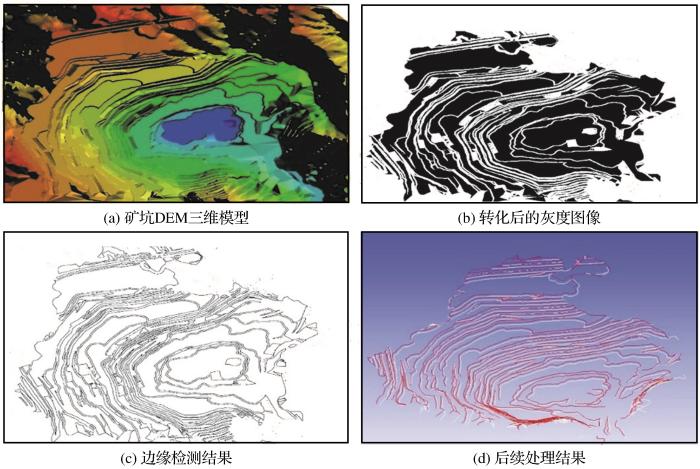
图7
坡面顶底线处理过程与结果
Fig.7
Processing and result of slope top and bottom line
从转化后的灰度图像来看,本文提出的方法在划分坡面与平面时的精度基本符合实际情况,说明标准差阈值的选取是合适的,试验中经多次调整,可以找到合适的标准差阈值,将大部分区域的坡面与平面精准分割。但在台阶较密集的区域,由于设定的ROI区域形状为矩形且尺寸受限,无法准确地贴合台阶区域,导致该部分区域的坡面和平面在划分时会被混合在一起,对结果产生影响。
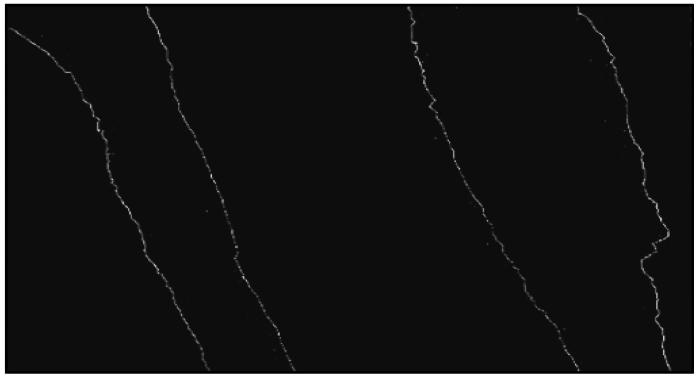
从边缘检测运算结果来看,经过边缘检测后所提取出的边缘区域基本与矿区实际坡面顶底线保持一致,大部分区域的坡面顶底线都能被完整地提取出来,但在一些边缘区域还存在一些异常提取,这部分异常的处理可以通过设定坡面顶底线的长度阈值,即点的数量来排除。
从后续骨架提取及抽稀处理运算结果来看,经过骨架提取后的台阶线更为精准,确保了台阶线的宽度只有单个像素宽,符合实际情况。同时,经过抽稀处理后,在保证结果精准度的前提下点的数量大幅降低。
图8
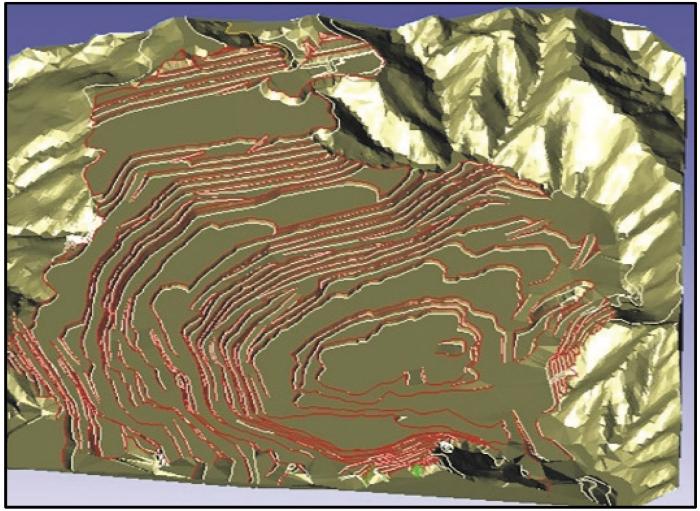
图8
自动化方法提取的坡面顶底线与三维模型叠加对比
Fig.8
Comparison of slope top and bottom line extracted by automatic method and super position of 3D model
2.3 应用前景
本文提出的自动化提取方法只需提供矿区的DEM数据便可快速精准地获取坡面顶底线的位置。随着倾斜摄影测量技术的逐渐成熟,矿区三维数字模型愈加容易获得,因此,与使用全站仪等仪器手工提取坡面顶底线的传统方法相比,本文方法极大地提高了效率,解决了矿山数字化建设面临的一个实际问题。未来还可以将该方法集成至数字采矿软件中,开发相应的功能,方便矿区人员快速获取矿坑坡面顶底线,进一步用于露天矿坑地形特征线的自动提取。
3 结论
(1)针对传统人工勾勒提取坡顶底线的低效率问题,提出了一种自动化提取方法。通过将三维DEM模型数据转化为二维图像数据,在转化后的图像数据基础上,采用边缘检测方法提取出边缘像素,并进行必要的后续处理,从而实现自动化提取,提高了提取效率。
(2)本文方法基于Windows操作系统的C++程序实现,未来可将程序嵌入至数字采矿软件中,作为其中的某一功能模块。该方法可推广应用至野外环境中地形特征线的提取,通过将三维模型根据高程值标准差的差异转化为二维图像,结合图像处理的方法,提取所需要的地形特征。
(3)本文方法在设定标准差阈值方面尚未实现自适应确定最佳阈值,仍需人为设置,后续将继续完善研究,尝试利用最大类间方差法并结合概率统计方法实现自适应确定最佳阈值,进一步提高坡面顶底线自动提取的精细化和自动化。
http://www.goldsci.ac.cn/article/2021/1005-2518/1005-2518-2021-29-4-612.shtml
参考文献
Automatic point cloud feature-line extraction algorithm based on curvature-mutation analysis
[J].
Improved Zhang-Suen thinning algorithm in binary line drawing applications
[C]//
Automatic registration of terrestrial and airborne point clouds using building outline features
[J].
FPGA implementation of the bilinear interpolation algorithm for image demosaicking
[C]//International Conference on Ele-ctrical,Communications,and Computers.
Line feature extraction from RGB laser point cloud
[C]//International Congress on Image and Signal Processing,BioMedical Engineering and Informatics (CISP-BMEI).
An Efficient planar feature fitting method using point cloud simplification and threshold-independent baysac
[J].
Road-feature extraction using point cloud and 3D LiDAR sensor for vehicle localization
[C]//
A guided point cloud filtering algorithm combined with Gaussian statistics
[J].
A study of automatic vecror system about topographic map based on mathematical morphology
[J].
Experiment and analysis of point cloud denoising using bilateral filtering method
[J].
Optimal selection of the final boundary of open-pit mine under multi-factor conditions
[J].
Holistic optimization of production planning elements and its application for open-pit mine
[J].
The extraction of feature points from DEM geographic data in cloud computing environment
[C]//
GPS trajectory agglomeration and refined road network extraction
[J].
An improved Douglas-Peucker algorithm aimed at simplifying natural shoreline into direction-line
[C]//
Application of automatic generation method of open-pit characteristic line based on point cloud data
[J].
An approach to improve the ZS thinning algorithm
[C]//
Review on image interpolation techniques
[J].
Surveying and mapping of open-pit mining area using unmanned aerial vehicle
[J].
The extraction of topographic patterns based on regular grid DEMs
[J].
基于曲率突变分析的点云特征线自动提取
[J].
一种结合高斯统计的点云引导滤波算法
[J].
基于数学形态学的地形图自动矢量化研究
[J].
利用双边滤波法进行点云去噪的试验与分析
[J].
多因素条件下的露天矿最终境界优选
[J].
露天矿生产规划要素整体优化方法及其应用
[J].
出租车GPS轨迹集聚和精细化路网提取
[J].
基于点云数据的露天矿坑特征线自动生成方法的应用
[J].
图像插值技术综述
[J].
基于无人机的露天矿区测绘研究
[J].
基于规则格网DEM的地形特征提取算法
[J].


 甘公网安备 62010202000672号
甘公网安备 62010202000672号{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}