


开展工程地质调查,获取巷道的结构面信息,是开展巷道岩体稳定性分析的基础。结构面信息获取包括产状、迹长、间距和张开度等参数的测量(葛云峰等,2017)。传统结构面测量方式主要采用测线法和统计窗法,利用罗盘、测斜仪与卷尺等工具进行人工测量,但受限于地下矿山的工程地质条件,部分岩体区域无法开展人工测量工作,且受到光线、粉尘和湿度的影响,获取的结构面数据量有限且准确度较低(陈娜,2018)。Barla et al.(2000)证实了数据量庞大且具有代表性的结构面数据,可助力研究人员更合理地解析岩体结构,从而使岩体稳定性评价结果更可靠。因此,亟需一种安全、高效且精确的岩体结构面测量技术,为巷道稳定性分析提供准确的基础数据。
近年来,利用三维激光扫描获取岩体结构面信息成为一种高精度且便捷、高效的岩体非接触测量手段(Sturzenegger et al.,2009;Ferrero et al.,2009;Otoo et al.,2013;Lato et al.,2010;Ge et al.,2018)。相对于传统单点激光测量,三维激光扫描可在短时间内大面积高分辨率地获取被测对象表面的三维数据点,即三维点云数据。我国学者对三维激光扫描在结构面测量方面进行了一些探索。董秀军等(2006)较早地应用三维激光扫描对结构面进行测量,并指出了三维激光扫描在结构面探测方面的应用前景;何秉顺等(2007)给出了基于三维激光扫描技术的半自动与全自动2种结构面识别方法与步骤;刘昌军等(2011)基于三维激光扫描所获取的点云数据,编制了结构面自动识别与分组的软件;荆洪迪等(2015)将岩体结构面信息提取与三维激光扫描技术进行系统集成,实现快速、自动、高精度的结构面识别与分组;葛云峰等(2016)基于激光扫描技术与离散元模拟方法,模拟并分析了考虑岩体结构特征的高速远程滑坡演化过程及其致灾范围。
受限于地下巷道的复杂工况和三维激光扫描仪的精度问题,目前三维激光扫描技术多用于地下巷道变形监测研究(张弛,2019;陆培庆,2020),而在地下巷道结构面识别方面的应用相对较少,因此三维激光扫描技术在地下巷道结构面识别方面的应用具有非常大的潜力(Fekete et al.,2013)。本研究通过简述三维激光扫描的原理与工作流程,以云锡卡房矿为工程背景,开展三维激光扫描在地下巷道岩体结构面识别的应用研究。
1 三维激光扫描系统与工作流程
1.1 三维激光扫描系统及其原理
图1
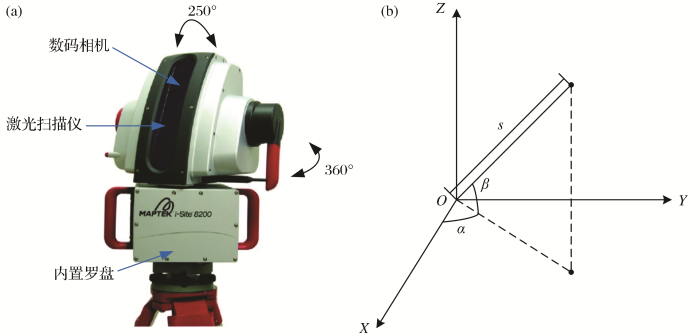
在扫描作业中,仪器内置的数码相机可对扫描物体表面进行实时的摄影成像,配合点云数据的表面重构,能够更好地展现被扫描物体的真实表面信息。由于井下无GPS信号,内置罗盘可帮助仪器识别正北方向,并构建以自身为原点的局部三维坐标系,从而计算所获取点云数据的三维坐标。
1.2 点云数据采集与处理
点云数据的采集与处理包括外业数据收集与内业数据处理(Li et al.,2019),如图2所示。在进行巷道三维点云数据收集之前,需根据现场实际情况调查,沿巷道布置扫描站点。所布置的站点之间应保持通视,为保证各站点间数据拼接的完整性,各站点间的扫描区域应有一定量的重叠。此外,由于各站点所收集的点云数据均处于不同的局部坐标系,需在各站点间布置控制标靶,控制标靶的地理坐标是已知的,通过各控制点的连接可将各站点数据配准至统一大地坐标系。
图2

通常,三维激光扫描仪只需数分钟即可完成一个站点的数据收集工作,能够在10 min内完成百米长巷道的数据扫描,测量效率十分高效。在各站点收集点云数据后,采用所配套的PointStudio点云处理软件进行内业数据处理。数据处理流程包括点云误差处理、点云坐标矫正、结构面数据提取、点云拼接和点云过滤抽稀等系列工作(宋杰等,2013),最后对所处理的点云数据进行三维重构即可得到巷道的真实三维模型。
1.3 巷道结构面识别与几何信息提取
基于三维激光扫描点云数据的结构面识别与几何信息提取方法可划分为全自动方法和半自动方法(何秉顺等,2007)。全自动方法是通过计算机算法在点云模型中快速、智能地获取点云模型中的结构面信息,全程无人为干预;半自动方法是通过人为操作与计算机算法相结合的方式实现结构面的识别,具备一定的主观性。在地下巷道中,全自动识别方法无法准确区分岩体结构面与巷道围岩的爆破缺陷,因此,基于PointStudio点云数据处理软件,采用半自动方法开展点云模型中的结构面识别与几何信息提取工作,具体步骤如下:
图3

图3
结构面识别与几何信息提取
(a)、(c)、(e)为巷道近景影像;(b)、(d)、(f)为巷道点云模型
Fig.3
Structural plane recognition and geometric information extraction
(2)通过对比,在点云模型中选择与近景影像对应的结构面区域,基于最小二乘算法得到所选结构面区域的产状,并以平面中距离最长的两点为直径生成圆盘结构面[图3(b)]。
重复以上步骤即可提取出巷道结构面数据。由于三维激光扫描仪的视距问题以及主观因素影响,所提取的结构面数据在产状和迹长上需要进行误差修正(Chen et al.,2018;Lato et al.,2009,2010),在此不作具体论述。后续通过PointStudio软件结构面间距统计分析功能,最终可从点云数据中获取结构面的中心点坐标(x,y,z)、产状(倾角、倾向、走向)、结构面的直径、结构面出露面积和结构面间距等几何信息。
2 工程应用
2.1 工程背景
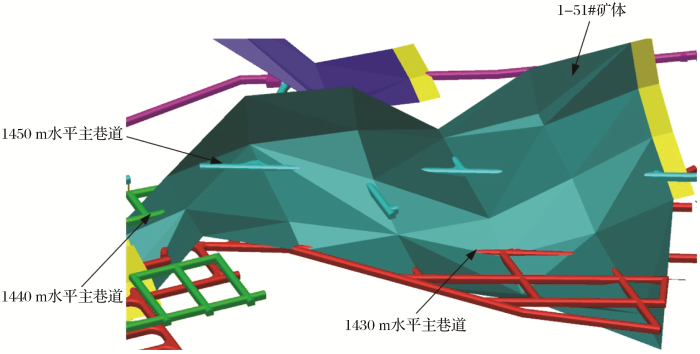
大白岩生产区是云南锡业股份有限公司卡房分公司重要的单铜资源生产基地,其中Ⅰ-51#矿群是大白岩区域内一个典型的矿体。该矿床属于与花岗岩热动力有关的接触带矽卡岩铜锡硫化矿床,矿石致密坚硬,稳固性好,由于地压与围岩热环境的影响,矿体围岩的不连续面较为发育。
1 430 m、1 440 m 和1 450 m水平巷道作为Ⅰ-51#矿群的主要中段巷道,是人员与设备运输作业的主要通道,如图4所示。为保证该生产区的安全生产,亟需通过开展工程地质调查来评估工程岩体的稳定性。然而,大白岩区域矿体属深部硫化矿石,平均干球温度可达35 ℃以上,坑内空气湿度大,井下作业条件差,采用传统的工程地质调查方式难以有效评估岩体的稳定性。三维激光扫描技术具有快速、高效的特点,适用于上述高温恶劣环境作业。因此,本文借助三维激光扫描技术的优势,对巷道岩体结构面进行了三维激光扫描探测。
图4
2.2 点云数据收集
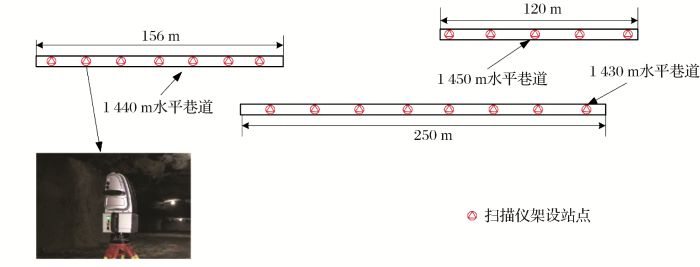
对云锡卡房矿大白岩区域Ⅰ-51#矿群1 430 m、1 440 m和1 450 m水平主巷道开展了三维激光扫描作业。其中,1 430 m水平巷道扫描区域长度约为250 m,1 440 m水平巷道扫描区域长度约为156 m,1 450 m水平巷道扫描区域长度约为120 m。为全面、精确地采集各巷道点云数据,扫描作业前先在巷道内进行扫描站点的布置,如图5所示。1 430 m水平巷道所扫描的区域最长,共布设8个扫描站点,1 440 m和1 450 m水平巷道分别布设了5个和7个扫描站点。
图5
在各扫描站点开展巷道的三维激光扫描作业后,将所获取的点云数据导入数据处理软件中,开展点云坐标校正、点云误差处理、点云过滤抽稀和点云拼接等系列工作,最终得到巷道的点云模型,并经过三维重构得到巷道的真实三维模型。图6为1 430 m水平巷道的点云模型和三维重构模型。
图6
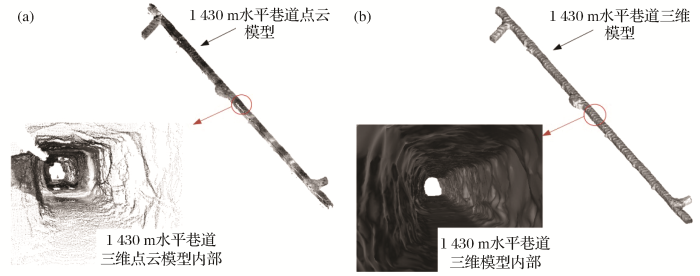
图6
1 430 m水平巷道点云模型(a)和三维重构模型(b)
Fig.6
Point cloud model(a)and 3D reconstruction model(b)of 1 430 m level roadway
2.3 巷道结构面数据提取与统计分析
基于结构面半自动提取方法,在所构建的1 430 m、1 440 m和1 450 m水平巷道的点云数据模型和三维重构模型的基础上,开展结构面数据的提取工作。在1 430 m、1 440 m和1 450 m水平巷道分别提取了450条、367条和309条结构面数据。利用Dips结构面统计分析软件,依次对水平巷道的结构面数据进行统计分组,以1 430 m水平巷道为例,分组结果如图7所示。
图7
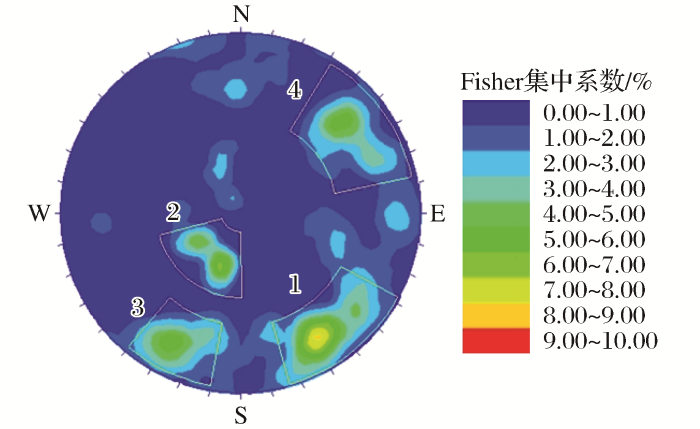
图7
1 430 m水平巷道结构面统计分组
Fig.7
Structural plane statistics grouping of 1 430 m level roadway
由各巷道结构面数据的等密度图分析得出,1 430 m水平巷道共有4组优势结构面,结构面较为发育,应在后续开采过程中对1 430 m水平巷道进行重点监测。最后,根据每组结构面的分布情况,计算得到3个水平巷道优势结构面的产状信息、迹长和平均间距等统计信息,结果见表1。
表1 优势结构面统计
Table 1
| 监测位置 | 结构面组 | 倾向/(°) | 倾角/(°) | 迹长/m | 间距/m |
|---|---|---|---|---|---|
1 430 m水平 巷道 | SET1 | 323 | 80 | 0.99 | 1.37 |
| SET2 | 36 | 31 | 1.31 | 2.48 | |
| SET3 | 26 | 76 | 0.91 | 4.23 | |
| SET4 | 230 | 77 | 0.94 | 4.93 | |
1 440 m水平 巷道 | SET1 | 172 | 42 | 1.13 | 0.47 |
| SET2 | 300 | 79 | 0.88 | 0.98 | |
1 450 m水平 巷道 | SET1 | 147 | 85 | 1.16 | 1.02 |
| SET2 | 211 | 83 | 0.68 | 2.87 |
将所提取的部分1 430 m水平巷道结构面数据与所在巷道三维模型进行耦合,结果如图8所示。相比于传统结构面测量手段,基于三维激光扫描点云数据的结构面信息提取方法不仅能识别巷道两帮的结构面数据,还可对巷道顶板的结构面数据进行采集,使得巷道的结构面数据更全面且具有代表性。
图8
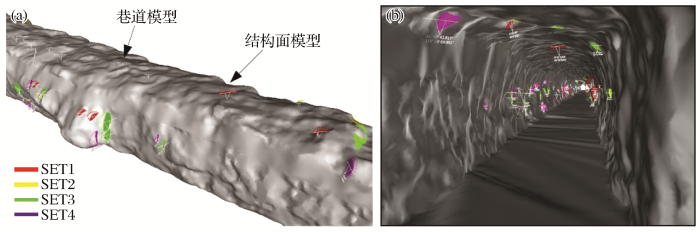
图8
巷道与结构面三维耦合模型
(a)巷道外部;(b)巷道内部
Fig.8
3D coupling model of roadway and structural plane
2.4 岩体结构面三维激光扫描技术优势对比
图9
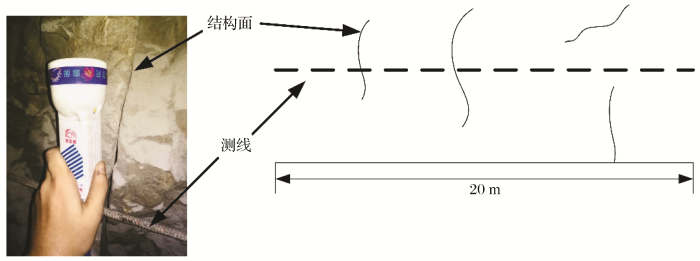
图10

图10
传统测线法所获取的结构面数据
Fig.10
Structural plane data obtained by traditional scanline method
可以看出,在1 430 m水平巷道内通过测线法得到的实测数据识别出2组优势结构面(图10),分别是324°∠67°和33°∠60°,其中测线法获取的第2组优势结构面在三维激光扫描所获取的数据中可进一步划分为2组倾角不同而倾向相近的优势结构面组(图7),表明结构面的数据量是精确解析巷道岩体结构的关键。此外,三维激光扫描所获取的结构面数据共识别出4组优势结构面,而采用传统测线法并不能很好地测取第4组优势结构面(230°∠77°)的数据,主要原因是第4组优势结构面主要分布于所测巷道的顶板处,而传统测线法只能获取巷道一侧的结构面数据,从而造成结构面数据的缺失。另一方面,由于实际测量工作受到高温、高湿等恶劣环境的影响,且工作人员无法在危险区域开展测量,因此人工测线法的工作量相对较大,这将导致测量的结构面数量减少且质量进一步降低。由此可见,三维激光扫描测量方式能对整个巷道的顶板以及两侧进行全面的岩体结构面解析,其所获取的结构面数据大且更具有代表性,能准确反映出整个巷道的真实岩体结构。
3 结论
(1)三维激光扫描技术能够很好地适应地下矿山高粉尘、高温和高湿等复杂环境,对架设站点的工作环境和仪器架设姿态要求不高,且高密度的点云数据完全满足地下矿山的精度需求,在地下矿山实际生产中具有良好的推广应用价值。
(2)三维激光扫描的外业数据收集可在较短时间内获取人工测量无法比拟的数据量,不仅提高了测量工作效率和质量,同时降低了测量人员的工作强度。
(3)通过计算机算法与人工操作配合即可完成结构面的自动识别和几何信息提取,无需用地质罗盘逐一测量并记录结构面信息。与传统工程调查结果相比,三维激光扫描所获取的结构面数据更可靠且精度更高,现场测量时工作人员可重点关注结构面的填充性质、力学性质和地学成因等信息,为岩体结构分析提供更准确的依据。
(4)在大白岩区域Ⅰ-51#矿群的1 430 m、1 440 m和1 450 m水平巷道分别识别出4组、2组和2组优势结构面,其中1 430 m水平巷道结构面较为发育,应在后续的开采过程中加强该巷道围岩的监测与支护。
(5)相比传统的结构面测量手段,基于三维激光扫描技术的结构面测量方式可对巷道的顶板区域进行结构面数据的收集,所获取的结构面数据量能够更全面地反映巷道真实的岩体结构。
http://www.goldsci.ac.cn/article/2021/1005-2518/1005-2518-2021-29-2-236.shtml
参考文献
Continuum and discontinuum modelling in tunnel engineering
[J].
The Structural Information and Deformation Monitoring of Rock Slope Based on 3D Laser Scanning Technology
[D].
Rapid mapping and analysing rock mass discontinuities with 3D terrestrial laser scanning in the underground excavation
[J].
Application of 3D laser scanning technology in geological survey of high and steep slopes
[J].
Integration of three-dimensional laser scanning with discontinuum modelling for stability analysis of tunnels in blocky rockmasses
[J].
Advanced geostructural survey methods applied to rock mass characterization
[J].
Automated measurements of discontinuity geometric properties from a 3D-point cloud based on a modified region growing algorithm
[J].
Evaluation for deposit areas of rock avalanche based on features of rock mass structure
[J].
Intelligent identification and extraction of geometric properties of rock discontinuities based on terrestrial laser scanning
[J].
Application of three-dimensional laser scanning system in the identification of rock mass structural plane
[J].
Extraction of rock mass structural plane information based on 3D laser scanning
[J].
Optimization of LiDAR scanning and processing for automated structural evaluation of discontinuities in rock masses
[J].
Bias correction for view-limited lidar scanning of rock outcrops for structural characterization
[J].
Automatic characterization of rock mass discontinuities using 3D point clouds
[J].
Fully automatic fuzzy cluster analysis and geometric information acquisition of rock mass structural plane based on laser point cloud data
[J].
Application of mobile 3D laser scanning technology in deformation monitoring of subway tunnels
[J].
Verification of a 3-D lidar viewer for discontinuity orientations
[J].
Geometric method of rock mass stability analysis
[J].
Finite element analysis of jointed rock slope based on LiDAR technology
[J].
Close-range terrestrial digital photogrammetry and terrestrial laser scanning for discontinuity characterization on rock cuts
[J].
Testing technology and application of laser scanning tunnel deformation and rock structure plane
[J].
Monitoring method of tunnel deformation near blasting construction based on 3D laser scanning technology
[J].
基于三维激光扫描的边坡岩体结构信息提取和变形监测研究
[D].
三维激光扫描技术在高陡边坡地质调查中的应用
[J].
基于岩体结构特征的高速远程滑坡致灾范围评价
[J].
基于三维激光扫描技术的岩体结构面智能识别与信息提取
[J].
三维激光扫描系统在岩体结构面识别中的应用
[J].
基于三维激光扫描的岩体结构面信息提取
[J].
基于激光点云数据的岩体结构面全自动模糊群聚分析及几何信息获取
[J].
移动式三维激光扫描技术在地铁隧道变形监测中的应用
[J].
岩体稳定分析的几何方法
[J].
基于 LiDAR 技术的节理岩质边坡有限元分析
[J].
激光扫描隧洞变形与岩体结构面测试技术及应用
[J].
基于三维激光扫描技术的临近爆破施工隧道变形监测方法
[J].


 甘公网安备 62010202000672号
甘公网安备 62010202000672号{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}