With the development of intelligent construction of mine,the detection of mine equipment is becoming more and more intelligent.The ore conveyor belt is one of the important production equipment in the mine,and the abnormal detection of the conveyor roller is one of the important contents of mine safety.At present,most of the ore conveyor roller inspection is manual inspection,and depends on the personal experience of the inspector to judge the working status of the roller,which will lead to problems such as the damage of the roller is not found in time.Therefore,it is urgent to study a more objective,intelligent and efficient method for abnormal detection of rollers.In order to solve the problems of low efficiency and poor real-time performance of the traditional ore conveyor roller anomaly detection method,an optimization model of ore conveyor roller anomaly detection based on infrared image recognition was proposed.The infrared image of the roller was collected on the spot and the infrared image data set of the roller was expanded by using label smoothing and Mosaic data enhancement processing to prevent the overfitting of the detection model and reduce the training cost of the model.In the feature extraction module,it was proposed to use GhostNet backbone feature extraction network,which can effectively reduce the image redundancy produced by feature extraction,accelerate the learning speed of the model,and further optimize the backbone feature extraction network through LeakyReLU activation function to improve the learning ability of the model.In the feature fusion module,multi-dimensional feature fusion was realized through the feature pyramid structure and the bottom-up feature fusion layer,and the SPP-Net module was used to optimize the PaNet feature fusion network to increase the effective receptive field of the model.And through the depth separable convolution block to simplify the model structure,reduce the amount of calculation and the number of parameters of the model.The experimental results show that,compared with the mainstream detection model,the detection model can more effectively identify rollers and distinguish between normal and abnormal rollers.In the actual detection,the detection accuracy of the idlers is 96.2%,the recall rate is 95.9%,and the average detection accuracy is 94.9%,in which the accuracy of abnormal rollers is 99.6%,the accuracy of normal rollers is 90.2%,the detection speed is 39.2 FPS,and the number of model parameters is only 1.1×107.The method provides a guarantee for accurate and efficient inspection of mine conveyor rollers.
RUAN Shunling, RUAN Yankang, LU Caiwu, GU Qinghua. Detection of Ore Conveyer Roller Based on Infrared Image[J]. Gold Science and Technology, 2023, 31(1): 123-132 doi:10.11872/j.issn.1005-2518.2023.01.099
目前已有学者对托辊异常检测方法进行了研究。孙维等(2016)通过光纤传感器感知托辊振动来检测异常托辊。Ravikumar et al.(2019)提出引用k-star算法对振动信号进行分析,实现对托辊轴承的状态检测。苏辉等(2018)基于温度提出了一种针对卡阻托辊的故障检测方法。郭清华(2018)提出了2种基于托辊温度的故障检测方法。宋天祥等(2019)利用2种算法对托辊音频进行分析,完成托辊故障检测。郝洪涛等(2019)构架了一种基于声音信号的托辊故障诊断系统。曹贯强(2020)提出了基于音频信号的托辊异常检测方法,该方法通过对托辊运转时产生的音频信号进行特征分析,从而对托辊的异态进行确认。刘芬(2020)利用大数据技术对托辊运作产生的音频进行分析,以达到托辊故障诊断的目的。伊鑫等(2020)利用K近邻算法和支持向量机对托辊音频进行分类,从而诊断托辊状态。Zhang et al.(2021)提出利用小波包变换的teager能量谱峰度对输送机故障轴承声源进行定位。Yang et al.(2020)提出利用SVD算法从音频数据中提取故障特征。上述检测手段主要基于振动、温度和音频等来评估托辊的健康状态,很难对托辊当前状态进行可视化展示,难以满足生产设备管理的要求。随着机器视觉的发展,谢苗等(2020)基于托辊红外图像,采用多种机器学习的方法识别卡阻托辊。该方法采用仿真试验数据,但机器学习方法的精准率和速度并不高。
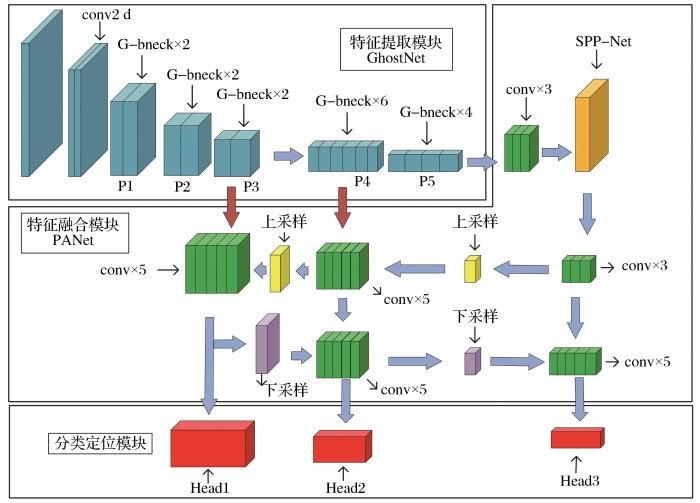
本文结合矿石传送带托辊异常检测问题的特点,基于深度学习理论,提出一种基于红外图像的传送带托辊异常自动检测模型。通过对GhostNet(Han et al.,2020)网络激活函数和卷积块进行优化,完成对托辊特征的高效提取,并通过融合SPP-Net(He et al.,2015)的PANet(Liu et al.,2018)结构进行特征融合,实现对传送带托辊异常的自动检测,为矿山企业托辊的安全管理提供新方法。
为克服传统损失函数IOU只根据交并比来计算损失,当真实的检测框与预测的检测框之间没有交差时,无法更新Loss的问题,本文采用CIOU(Zheng et al.,2021)作为正样本边界框的回归损失。除了IOU,CIOU也将先验框与目标框中心点之间的距离、重叠程度、大小以及预测框的宽高比拟合目标框宽高比的效果考虑进去,使得损失函数能够更加充分地表达预测框与目标框之间的比拟程度。CIOU的计算公式为
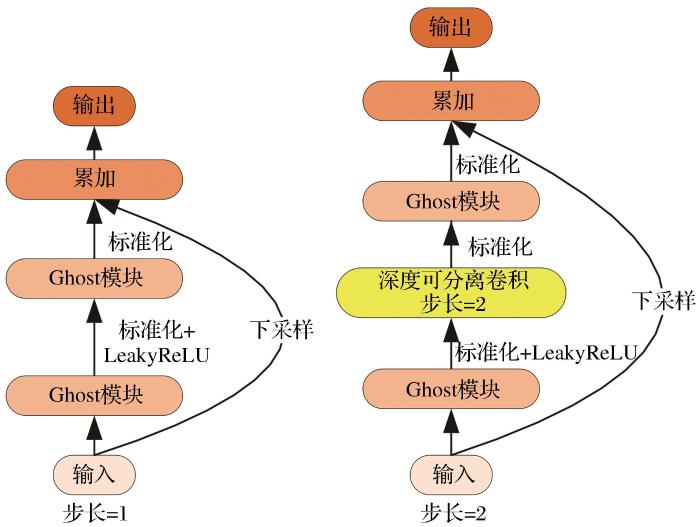
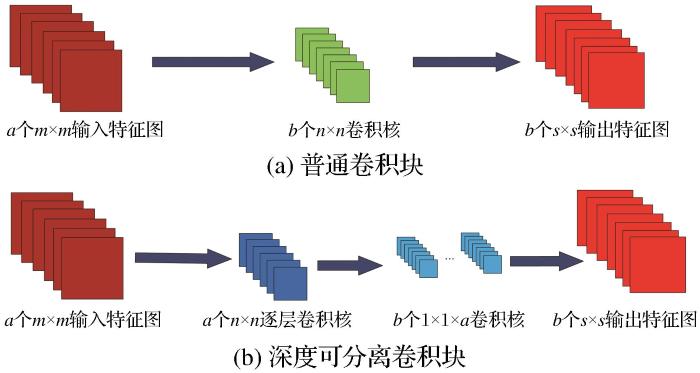
为了构建高效的特征提取模块,基于Ghost模块构建颈部结构。如图3所示,当步长为1时,颈部结构主要利用Ghost模块进行通道数的调整,采用标准化(Ioffe et al.,2015)和LeakyReLU激活函数将特征层归一化,最后将下采样结果与主干部分结果融合输出;当步长为2时,在主干部分的2个Ghost模块中使用深度可分离卷积块进行托辊有效特征层的宽高压缩,进一步优化模型,其余操作与步长为1时相同。使用2种步长进行特征提取,可以采集不同层面的图像特征,使所提取的特征种类更加丰富。
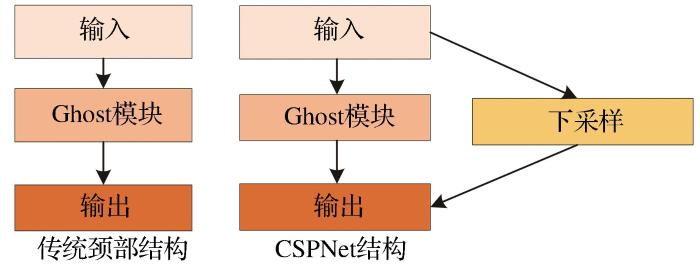
相比传统的颈部结构,本文模型的颈部结构采用了CSPNet(Wang et al.,2020)结构。如图4所示,该结构将单独的模块拆分成左右2个部分,主干部分继续保持原来模块的结构,另一部分则经过下采样处理,最后将2个部分的结果相加作为最后的输出结果。该结构通过增加1条残差边的方式,有效提高卷积网络学习能力,降低计算瓶颈,减少内存流量,从而提高网络速度。
Yolov4:Optimal speed and accuracy of object detection
1
2020
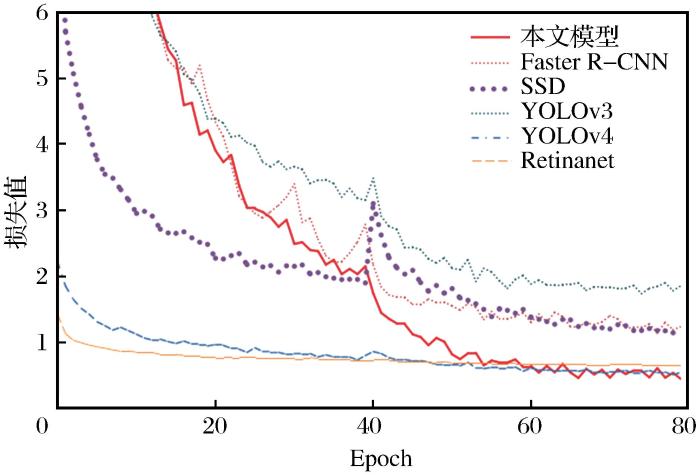
... 为了验证本文托辊异常检测模型性能,在试验中选择Faster R-CNN(Ren et al.,2017)、Retinanet(Lin et al.,2017)、SSD(Liu et al.,2016)、YOLOv3(Redmon et al.,2016)和YOLOv4(Bochkovskiy et al.,2020)共5种常见检测模型与本文检测模型进行对比分析.试验结果见表6. ...
Fault detection method for belt conveyor roller
0
2020
Research on roller fault identification algorithm of belt conveyor system based on fiber temperature measurement technology
0
2018
Ghostnet:More features from cheap operations
1
2020
... 本文结合矿石传送带托辊异常检测问题的特点,基于深度学习理论,提出一种基于红外图像的传送带托辊异常自动检测模型.通过对GhostNet(Han et al.,2020)网络激活函数和卷积块进行优化,完成对托辊特征的高效提取,并通过融合SPP-Net(He et al.,2015)的PANet(Liu et al.,2018)结构进行特征融合,实现对传送带托辊异常的自动检测,为矿山企业托辊的安全管理提供新方法. ...
Fault diagnosis method of rollers based on sound signals
0
2019
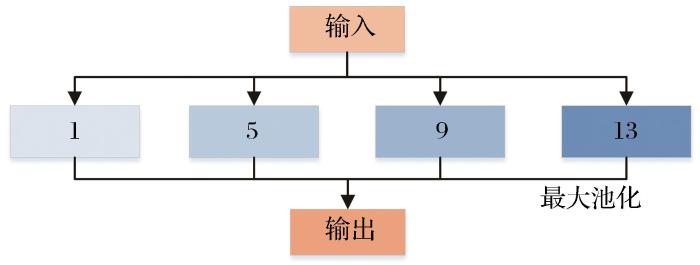
Spatial pyramid pooling in deep convolutional networks for visual recognition
1
2015
... 本文结合矿石传送带托辊异常检测问题的特点,基于深度学习理论,提出一种基于红外图像的传送带托辊异常自动检测模型.通过对GhostNet(Han et al.,2020)网络激活函数和卷积块进行优化,完成对托辊特征的高效提取,并通过融合SPP-Net(He et al.,2015)的PANet(Liu et al.,2018)结构进行特征融合,实现对传送带托辊异常的自动检测,为矿山企业托辊的安全管理提供新方法. ...
Batch normalization:Accelerating deep network training by reducing internal covariate shift
1
2015
... 为了构建高效的特征提取模块,基于Ghost模块构建颈部结构.如图3所示,当步长为1时,颈部结构主要利用Ghost模块进行通道数的调整,采用标准化(Ioffe et al.,2015)和LeakyReLU激活函数将特征层归一化,最后将下采样结果与主干部分结果融合输出;当步长为2时,在主干部分的2个Ghost模块中使用深度可分离卷积块进行托辊有效特征层的宽高压缩,进一步优化模型,其余操作与步长为1时相同.使用2种步长进行特征提取,可以采集不同层面的图像特征,使所提取的特征种类更加丰富. ...
Focal loss for dense object detection
1
2017
... 为了验证本文托辊异常检测模型性能,在试验中选择Faster R-CNN(Ren et al.,2017)、Retinanet(Lin et al.,2017)、SSD(Liu et al.,2016)、YOLOv3(Redmon et al.,2016)和YOLOv4(Bochkovskiy et al.,2020)共5种常见检测模型与本文检测模型进行对比分析.试验结果见表6. ...
Fault diagnosis of roller of belt conveyor based on big data technology
0
2020
Path aggregation network for instance segmentation
1
2018
... 本文结合矿石传送带托辊异常检测问题的特点,基于深度学习理论,提出一种基于红外图像的传送带托辊异常自动检测模型.通过对GhostNet(Han et al.,2020)网络激活函数和卷积块进行优化,完成对托辊特征的高效提取,并通过融合SPP-Net(He et al.,2015)的PANet(Liu et al.,2018)结构进行特征融合,实现对传送带托辊异常的自动检测,为矿山企业托辊的安全管理提供新方法. ...
Ssd:Single shot multibox detector
1
2016
... 为了验证本文托辊异常检测模型性能,在试验中选择Faster R-CNN(Ren et al.,2017)、Retinanet(Lin et al.,2017)、SSD(Liu et al.,2016)、YOLOv3(Redmon et al.,2016)和YOLOv4(Bochkovskiy et al.,2020)共5种常见检测模型与本文检测模型进行对比分析.试验结果见表6. ...
Fault diagnosis of self-aligning troughing rollers in belt conveyor system using k-star algorithm
1
2019
... 目前已有学者对托辊异常检测方法进行了研究.孙维等(2016)通过光纤传感器感知托辊振动来检测异常托辊.Ravikumar et al.(2019)提出引用k-star算法对振动信号进行分析,实现对托辊轴承的状态检测.苏辉等(2018)基于温度提出了一种针对卡阻托辊的故障检测方法.郭清华(2018)提出了2种基于托辊温度的故障检测方法.宋天祥等(2019)利用2种算法对托辊音频进行分析,完成托辊故障检测.郝洪涛等(2019)构架了一种基于声音信号的托辊故障诊断系统.曹贯强(2020)提出了基于音频信号的托辊异常检测方法,该方法通过对托辊运转时产生的音频信号进行特征分析,从而对托辊的异态进行确认.刘芬(2020)利用大数据技术对托辊运作产生的音频进行分析,以达到托辊故障诊断的目的.伊鑫等(2020)利用K近邻算法和支持向量机对托辊音频进行分类,从而诊断托辊状态.Zhang et al.(2021)提出利用小波包变换的teager能量谱峰度对输送机故障轴承声源进行定位.Yang et al.(2020)提出利用SVD算法从音频数据中提取故障特征.上述检测手段主要基于振动、温度和音频等来评估托辊的健康状态,很难对托辊当前状态进行可视化展示,难以满足生产设备管理的要求.随着机器视觉的发展,谢苗等(2020)基于托辊红外图像,采用多种机器学习的方法识别卡阻托辊.该方法采用仿真试验数据,但机器学习方法的精准率和速度并不高. ...
You only look once:Unified,real-time object detection
1
2016
... 为了验证本文托辊异常检测模型性能,在试验中选择Faster R-CNN(Ren et al.,2017)、Retinanet(Lin et al.,2017)、SSD(Liu et al.,2016)、YOLOv3(Redmon et al.,2016)和YOLOv4(Bochkovskiy et al.,2020)共5种常见检测模型与本文检测模型进行对比分析.试验结果见表6. ...
Faster r-cnn:Towards real-time object detection with region proposal networks
1
2017
... 为了验证本文托辊异常检测模型性能,在试验中选择Faster R-CNN(Ren et al.,2017)、Retinanet(Lin et al.,2017)、SSD(Liu et al.,2016)、YOLOv3(Redmon et al.,2016)和YOLOv4(Bochkovskiy et al.,2020)共5种常见检测模型与本文检测模型进行对比分析.试验结果见表6. ...
Fault diagnosis for roller based on spectral clustering analysis
0
2019
Design of roller fault monitoring system based on ZigBee wireless sensor network
0
2018
Roller fault detection of belt convey or based on φ-OTDR technology
0
2016
Rethinking the inception architecture for computer vision
1
2016
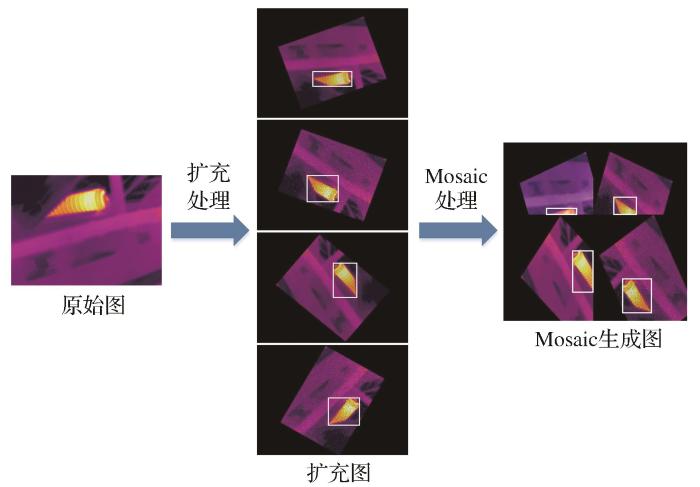
... 为了减小托辊异常检测模型的过拟合程度,本文采用标签平滑(Label Smoothing)(Szegedy et al.,2016)对检测模型进行优化.通过调整预测的目标上限为1个较低的值,在一定程度缩小标签中最小值和最大值的差距,降低检测模型的分类精度,从而减小过拟合. ...
CSPNet:A new backbone that can enhance learning capability of CNN
1
2020
... 相比传统的颈部结构,本文模型的颈部结构采用了CSPNet(Wang et al.,2020)结构.如图4所示,该结构将单独的模块拆分成左右2个部分,主干部分继续保持原来模块的结构,另一部分则经过下采样处理,最后将2个部分的结果相加作为最后的输出结果.该结构通过增加1条残差边的方式,有效提高卷积网络学习能力,降低计算瓶颈,减少内存流量,从而提高网络速度. ...
Research on detection method of roller jam based on infrared image processing technology
0
2020
Audio-based fault diagnosis for belt conveyor rollers
1
2020
... 目前已有学者对托辊异常检测方法进行了研究.孙维等(2016)通过光纤传感器感知托辊振动来检测异常托辊.Ravikumar et al.(2019)提出引用k-star算法对振动信号进行分析,实现对托辊轴承的状态检测.苏辉等(2018)基于温度提出了一种针对卡阻托辊的故障检测方法.郭清华(2018)提出了2种基于托辊温度的故障检测方法.宋天祥等(2019)利用2种算法对托辊音频进行分析,完成托辊故障检测.郝洪涛等(2019)构架了一种基于声音信号的托辊故障诊断系统.曹贯强(2020)提出了基于音频信号的托辊异常检测方法,该方法通过对托辊运转时产生的音频信号进行特征分析,从而对托辊的异态进行确认.刘芬(2020)利用大数据技术对托辊运作产生的音频进行分析,以达到托辊故障诊断的目的.伊鑫等(2020)利用K近邻算法和支持向量机对托辊音频进行分类,从而诊断托辊状态.Zhang et al.(2021)提出利用小波包变换的teager能量谱峰度对输送机故障轴承声源进行定位.Yang et al.(2020)提出利用SVD算法从音频数据中提取故障特征.上述检测手段主要基于振动、温度和音频等来评估托辊的健康状态,很难对托辊当前状态进行可视化展示,难以满足生产设备管理的要求.随着机器视觉的发展,谢苗等(2020)基于托辊红外图像,采用多种机器学习的方法识别卡阻托辊.该方法采用仿真试验数据,但机器学习方法的精准率和速度并不高. ...
The KNN and SVM-based 2-level comprehensive health indicators diagnosis method for detecting the failure of belt conveyor’s idlers
0
2020
Teager energy spectral kurtosis of wavelet packet transform and its application in locating the sound source of fault bearing of belt conveyor
1
2021
... 目前已有学者对托辊异常检测方法进行了研究.孙维等(2016)通过光纤传感器感知托辊振动来检测异常托辊.Ravikumar et al.(2019)提出引用k-star算法对振动信号进行分析,实现对托辊轴承的状态检测.苏辉等(2018)基于温度提出了一种针对卡阻托辊的故障检测方法.郭清华(2018)提出了2种基于托辊温度的故障检测方法.宋天祥等(2019)利用2种算法对托辊音频进行分析,完成托辊故障检测.郝洪涛等(2019)构架了一种基于声音信号的托辊故障诊断系统.曹贯强(2020)提出了基于音频信号的托辊异常检测方法,该方法通过对托辊运转时产生的音频信号进行特征分析,从而对托辊的异态进行确认.刘芬(2020)利用大数据技术对托辊运作产生的音频进行分析,以达到托辊故障诊断的目的.伊鑫等(2020)利用K近邻算法和支持向量机对托辊音频进行分类,从而诊断托辊状态.Zhang et al.(2021)提出利用小波包变换的teager能量谱峰度对输送机故障轴承声源进行定位.Yang et al.(2020)提出利用SVD算法从音频数据中提取故障特征.上述检测手段主要基于振动、温度和音频等来评估托辊的健康状态,很难对托辊当前状态进行可视化展示,难以满足生产设备管理的要求.随着机器视觉的发展,谢苗等(2020)基于托辊红外图像,采用多种机器学习的方法识别卡阻托辊.该方法采用仿真试验数据,但机器学习方法的精准率和速度并不高. ...
Enhancing geometric factors in model learning and inference for object detection and instance segmentation
1
2021
... 为克服传统损失函数IOU只根据交并比来计算损失,当真实的检测框与预测的检测框之间没有交差时,无法更新Loss的问题,本文采用CIOU(Zheng et al.,2021)作为正样本边界框的回归损失.除了IOU,CIOU也将先验框与目标框中心点之间的距离、重叠程度、大小以及预测框的宽高比拟合目标框宽高比的效果考虑进去,使得损失函数能够更加充分地表达预测框与目标框之间的比拟程度.CIOU的计算公式为 ...
带式输送机托辊故障检测方法
1
2020
... 目前已有学者对托辊异常检测方法进行了研究.孙维等(2016)通过光纤传感器感知托辊振动来检测异常托辊.Ravikumar et al.(2019)提出引用k-star算法对振动信号进行分析,实现对托辊轴承的状态检测.苏辉等(2018)基于温度提出了一种针对卡阻托辊的故障检测方法.郭清华(2018)提出了2种基于托辊温度的故障检测方法.宋天祥等(2019)利用2种算法对托辊音频进行分析,完成托辊故障检测.郝洪涛等(2019)构架了一种基于声音信号的托辊故障诊断系统.曹贯强(2020)提出了基于音频信号的托辊异常检测方法,该方法通过对托辊运转时产生的音频信号进行特征分析,从而对托辊的异态进行确认.刘芬(2020)利用大数据技术对托辊运作产生的音频进行分析,以达到托辊故障诊断的目的.伊鑫等(2020)利用K近邻算法和支持向量机对托辊音频进行分类,从而诊断托辊状态.Zhang et al.(2021)提出利用小波包变换的teager能量谱峰度对输送机故障轴承声源进行定位.Yang et al.(2020)提出利用SVD算法从音频数据中提取故障特征.上述检测手段主要基于振动、温度和音频等来评估托辊的健康状态,很难对托辊当前状态进行可视化展示,难以满足生产设备管理的要求.随着机器视觉的发展,谢苗等(2020)基于托辊红外图像,采用多种机器学习的方法识别卡阻托辊.该方法采用仿真试验数据,但机器学习方法的精准率和速度并不高. ...
基于光纤测温技术的带式输送机托辊故障识别算法研究
1
2018
... 目前已有学者对托辊异常检测方法进行了研究.孙维等(2016)通过光纤传感器感知托辊振动来检测异常托辊.Ravikumar et al.(2019)提出引用k-star算法对振动信号进行分析,实现对托辊轴承的状态检测.苏辉等(2018)基于温度提出了一种针对卡阻托辊的故障检测方法.郭清华(2018)提出了2种基于托辊温度的故障检测方法.宋天祥等(2019)利用2种算法对托辊音频进行分析,完成托辊故障检测.郝洪涛等(2019)构架了一种基于声音信号的托辊故障诊断系统.曹贯强(2020)提出了基于音频信号的托辊异常检测方法,该方法通过对托辊运转时产生的音频信号进行特征分析,从而对托辊的异态进行确认.刘芬(2020)利用大数据技术对托辊运作产生的音频进行分析,以达到托辊故障诊断的目的.伊鑫等(2020)利用K近邻算法和支持向量机对托辊音频进行分类,从而诊断托辊状态.Zhang et al.(2021)提出利用小波包变换的teager能量谱峰度对输送机故障轴承声源进行定位.Yang et al.(2020)提出利用SVD算法从音频数据中提取故障特征.上述检测手段主要基于振动、温度和音频等来评估托辊的健康状态,很难对托辊当前状态进行可视化展示,难以满足生产设备管理的要求.随着机器视觉的发展,谢苗等(2020)基于托辊红外图像,采用多种机器学习的方法识别卡阻托辊.该方法采用仿真试验数据,但机器学习方法的精准率和速度并不高. ...
基于声音信号的托辊故障诊断方法
1
2019
... 目前已有学者对托辊异常检测方法进行了研究.孙维等(2016)通过光纤传感器感知托辊振动来检测异常托辊.Ravikumar et al.(2019)提出引用k-star算法对振动信号进行分析,实现对托辊轴承的状态检测.苏辉等(2018)基于温度提出了一种针对卡阻托辊的故障检测方法.郭清华(2018)提出了2种基于托辊温度的故障检测方法.宋天祥等(2019)利用2种算法对托辊音频进行分析,完成托辊故障检测.郝洪涛等(2019)构架了一种基于声音信号的托辊故障诊断系统.曹贯强(2020)提出了基于音频信号的托辊异常检测方法,该方法通过对托辊运转时产生的音频信号进行特征分析,从而对托辊的异态进行确认.刘芬(2020)利用大数据技术对托辊运作产生的音频进行分析,以达到托辊故障诊断的目的.伊鑫等(2020)利用K近邻算法和支持向量机对托辊音频进行分类,从而诊断托辊状态.Zhang et al.(2021)提出利用小波包变换的teager能量谱峰度对输送机故障轴承声源进行定位.Yang et al.(2020)提出利用SVD算法从音频数据中提取故障特征.上述检测手段主要基于振动、温度和音频等来评估托辊的健康状态,很难对托辊当前状态进行可视化展示,难以满足生产设备管理的要求.随着机器视觉的发展,谢苗等(2020)基于托辊红外图像,采用多种机器学习的方法识别卡阻托辊.该方法采用仿真试验数据,但机器学习方法的精准率和速度并不高. ...
基于大数据技术的带式输送机托辊故障诊断
1
2020
... 目前已有学者对托辊异常检测方法进行了研究.孙维等(2016)通过光纤传感器感知托辊振动来检测异常托辊.Ravikumar et al.(2019)提出引用k-star算法对振动信号进行分析,实现对托辊轴承的状态检测.苏辉等(2018)基于温度提出了一种针对卡阻托辊的故障检测方法.郭清华(2018)提出了2种基于托辊温度的故障检测方法.宋天祥等(2019)利用2种算法对托辊音频进行分析,完成托辊故障检测.郝洪涛等(2019)构架了一种基于声音信号的托辊故障诊断系统.曹贯强(2020)提出了基于音频信号的托辊异常检测方法,该方法通过对托辊运转时产生的音频信号进行特征分析,从而对托辊的异态进行确认.刘芬(2020)利用大数据技术对托辊运作产生的音频进行分析,以达到托辊故障诊断的目的.伊鑫等(2020)利用K近邻算法和支持向量机对托辊音频进行分类,从而诊断托辊状态.Zhang et al.(2021)提出利用小波包变换的teager能量谱峰度对输送机故障轴承声源进行定位.Yang et al.(2020)提出利用SVD算法从音频数据中提取故障特征.上述检测手段主要基于振动、温度和音频等来评估托辊的健康状态,很难对托辊当前状态进行可视化展示,难以满足生产设备管理的要求.随着机器视觉的发展,谢苗等(2020)基于托辊红外图像,采用多种机器学习的方法识别卡阻托辊.该方法采用仿真试验数据,但机器学习方法的精准率和速度并不高. ...
基于谱聚类分析的托辊故障诊断
1
2019
... 目前已有学者对托辊异常检测方法进行了研究.孙维等(2016)通过光纤传感器感知托辊振动来检测异常托辊.Ravikumar et al.(2019)提出引用k-star算法对振动信号进行分析,实现对托辊轴承的状态检测.苏辉等(2018)基于温度提出了一种针对卡阻托辊的故障检测方法.郭清华(2018)提出了2种基于托辊温度的故障检测方法.宋天祥等(2019)利用2种算法对托辊音频进行分析,完成托辊故障检测.郝洪涛等(2019)构架了一种基于声音信号的托辊故障诊断系统.曹贯强(2020)提出了基于音频信号的托辊异常检测方法,该方法通过对托辊运转时产生的音频信号进行特征分析,从而对托辊的异态进行确认.刘芬(2020)利用大数据技术对托辊运作产生的音频进行分析,以达到托辊故障诊断的目的.伊鑫等(2020)利用K近邻算法和支持向量机对托辊音频进行分类,从而诊断托辊状态.Zhang et al.(2021)提出利用小波包变换的teager能量谱峰度对输送机故障轴承声源进行定位.Yang et al.(2020)提出利用SVD算法从音频数据中提取故障特征.上述检测手段主要基于振动、温度和音频等来评估托辊的健康状态,很难对托辊当前状态进行可视化展示,难以满足生产设备管理的要求.随着机器视觉的发展,谢苗等(2020)基于托辊红外图像,采用多种机器学习的方法识别卡阻托辊.该方法采用仿真试验数据,但机器学习方法的精准率和速度并不高. ...
基于ZigBee无线传感网络的托辊卡死故障监测系统设计
1
2018
... 目前已有学者对托辊异常检测方法进行了研究.孙维等(2016)通过光纤传感器感知托辊振动来检测异常托辊.Ravikumar et al.(2019)提出引用k-star算法对振动信号进行分析,实现对托辊轴承的状态检测.苏辉等(2018)基于温度提出了一种针对卡阻托辊的故障检测方法.郭清华(2018)提出了2种基于托辊温度的故障检测方法.宋天祥等(2019)利用2种算法对托辊音频进行分析,完成托辊故障检测.郝洪涛等(2019)构架了一种基于声音信号的托辊故障诊断系统.曹贯强(2020)提出了基于音频信号的托辊异常检测方法,该方法通过对托辊运转时产生的音频信号进行特征分析,从而对托辊的异态进行确认.刘芬(2020)利用大数据技术对托辊运作产生的音频进行分析,以达到托辊故障诊断的目的.伊鑫等(2020)利用K近邻算法和支持向量机对托辊音频进行分类,从而诊断托辊状态.Zhang et al.(2021)提出利用小波包变换的teager能量谱峰度对输送机故障轴承声源进行定位.Yang et al.(2020)提出利用SVD算法从音频数据中提取故障特征.上述检测手段主要基于振动、温度和音频等来评估托辊的健康状态,很难对托辊当前状态进行可视化展示,难以满足生产设备管理的要求.随着机器视觉的发展,谢苗等(2020)基于托辊红外图像,采用多种机器学习的方法识别卡阻托辊.该方法采用仿真试验数据,但机器学习方法的精准率和速度并不高. ...
基于φ-OTDR技术的带式输送机托辊故障检测
1
2016
... 目前已有学者对托辊异常检测方法进行了研究.孙维等(2016)通过光纤传感器感知托辊振动来检测异常托辊.Ravikumar et al.(2019)提出引用k-star算法对振动信号进行分析,实现对托辊轴承的状态检测.苏辉等(2018)基于温度提出了一种针对卡阻托辊的故障检测方法.郭清华(2018)提出了2种基于托辊温度的故障检测方法.宋天祥等(2019)利用2种算法对托辊音频进行分析,完成托辊故障检测.郝洪涛等(2019)构架了一种基于声音信号的托辊故障诊断系统.曹贯强(2020)提出了基于音频信号的托辊异常检测方法,该方法通过对托辊运转时产生的音频信号进行特征分析,从而对托辊的异态进行确认.刘芬(2020)利用大数据技术对托辊运作产生的音频进行分析,以达到托辊故障诊断的目的.伊鑫等(2020)利用K近邻算法和支持向量机对托辊音频进行分类,从而诊断托辊状态.Zhang et al.(2021)提出利用小波包变换的teager能量谱峰度对输送机故障轴承声源进行定位.Yang et al.(2020)提出利用SVD算法从音频数据中提取故障特征.上述检测手段主要基于振动、温度和音频等来评估托辊的健康状态,很难对托辊当前状态进行可视化展示,难以满足生产设备管理的要求.随着机器视觉的发展,谢苗等(2020)基于托辊红外图像,采用多种机器学习的方法识别卡阻托辊.该方法采用仿真试验数据,但机器学习方法的精准率和速度并不高. ...
基于红外图像处理技术的托辊卡阻检测方法
1
2020
... 目前已有学者对托辊异常检测方法进行了研究.孙维等(2016)通过光纤传感器感知托辊振动来检测异常托辊.Ravikumar et al.(2019)提出引用k-star算法对振动信号进行分析,实现对托辊轴承的状态检测.苏辉等(2018)基于温度提出了一种针对卡阻托辊的故障检测方法.郭清华(2018)提出了2种基于托辊温度的故障检测方法.宋天祥等(2019)利用2种算法对托辊音频进行分析,完成托辊故障检测.郝洪涛等(2019)构架了一种基于声音信号的托辊故障诊断系统.曹贯强(2020)提出了基于音频信号的托辊异常检测方法,该方法通过对托辊运转时产生的音频信号进行特征分析,从而对托辊的异态进行确认.刘芬(2020)利用大数据技术对托辊运作产生的音频进行分析,以达到托辊故障诊断的目的.伊鑫等(2020)利用K近邻算法和支持向量机对托辊音频进行分类,从而诊断托辊状态.Zhang et al.(2021)提出利用小波包变换的teager能量谱峰度对输送机故障轴承声源进行定位.Yang et al.(2020)提出利用SVD算法从音频数据中提取故障特征.上述检测手段主要基于振动、温度和音频等来评估托辊的健康状态,很难对托辊当前状态进行可视化展示,难以满足生产设备管理的要求.随着机器视觉的发展,谢苗等(2020)基于托辊红外图像,采用多种机器学习的方法识别卡阻托辊.该方法采用仿真试验数据,但机器学习方法的精准率和速度并不高. ...
基于KNN与SVM两级综合健康指标的托辊故障诊断方法
1
2020
... 目前已有学者对托辊异常检测方法进行了研究.孙维等(2016)通过光纤传感器感知托辊振动来检测异常托辊.Ravikumar et al.(2019)提出引用k-star算法对振动信号进行分析,实现对托辊轴承的状态检测.苏辉等(2018)基于温度提出了一种针对卡阻托辊的故障检测方法.郭清华(2018)提出了2种基于托辊温度的故障检测方法.宋天祥等(2019)利用2种算法对托辊音频进行分析,完成托辊故障检测.郝洪涛等(2019)构架了一种基于声音信号的托辊故障诊断系统.曹贯强(2020)提出了基于音频信号的托辊异常检测方法,该方法通过对托辊运转时产生的音频信号进行特征分析,从而对托辊的异态进行确认.刘芬(2020)利用大数据技术对托辊运作产生的音频进行分析,以达到托辊故障诊断的目的.伊鑫等(2020)利用K近邻算法和支持向量机对托辊音频进行分类,从而诊断托辊状态.Zhang et al.(2021)提出利用小波包变换的teager能量谱峰度对输送机故障轴承声源进行定位.Yang et al.(2020)提出利用SVD算法从音频数据中提取故障特征.上述检测手段主要基于振动、温度和音频等来评估托辊的健康状态,很难对托辊当前状态进行可视化展示,难以满足生产设备管理的要求.随着机器视觉的发展,谢苗等(2020)基于托辊红外图像,采用多种机器学习的方法识别卡阻托辊.该方法采用仿真试验数据,但机器学习方法的精准率和速度并不高. ...






 甘公网安备 62010202000672号
甘公网安备 62010202000672号{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}