 PDF(2729 KB)
PDF(2729 KB)
 PDF(2729 KB)
PDF(2729 KB)
PDF(2729 KB)
PDF(2729 KB)
地下矿卡智能调度与生产管理系统设计及应用
 ({{custom_author.role_cn}}), {{javascript:window.custom_author_cn_index++;}}
({{custom_author.role_cn}}), {{javascript:window.custom_author_cn_index++;}}Design and Application of Intelligent Dispatching and Production Management System for Underground Mining Trucks
({{custom_author.role_en}}), {{javascript:window.custom_author_en_index++;}}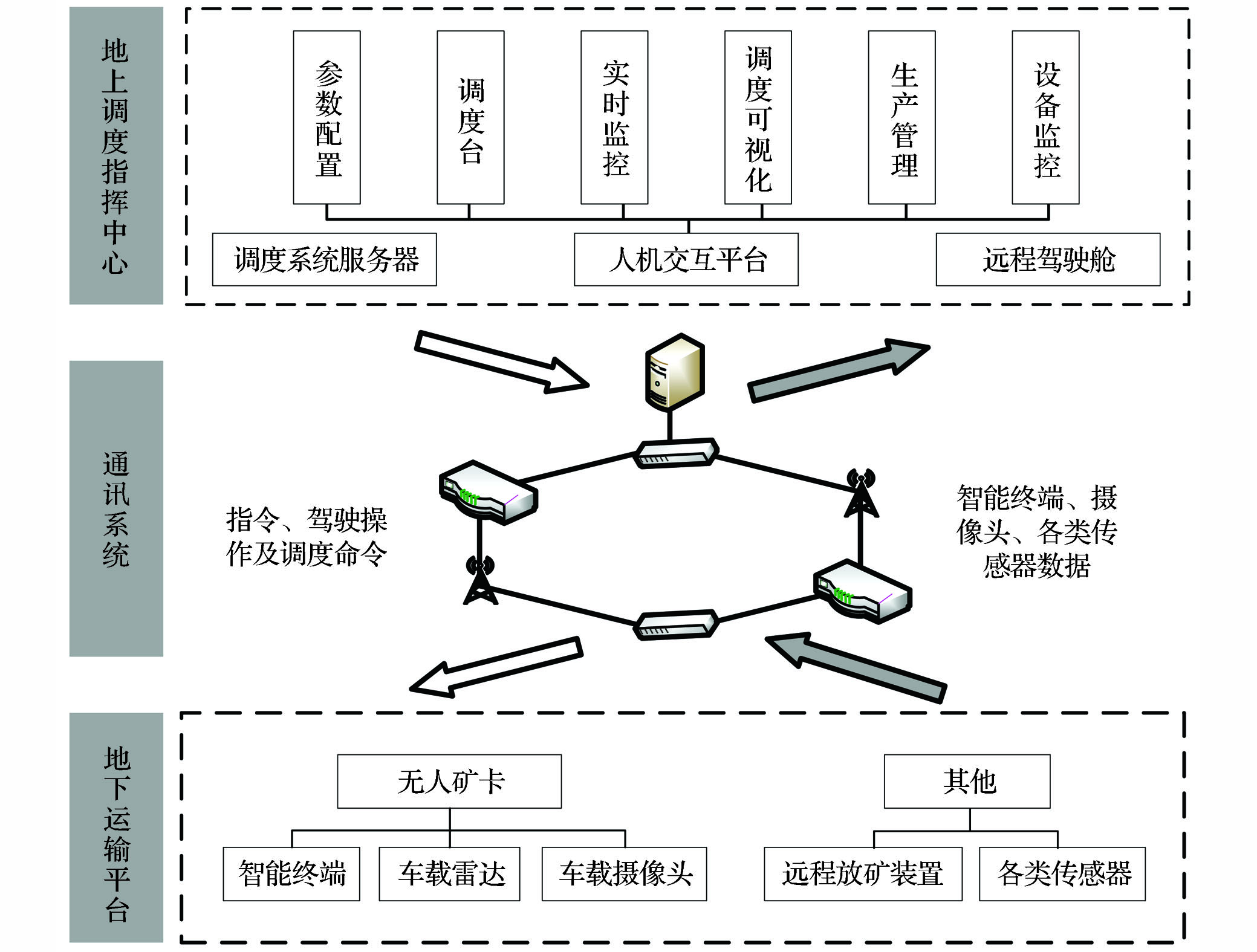
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|

/
| 〈 |
|
〉 |







 甘公网安备 62010202000672号
甘公网安备 62010202000672号