 PDF(1125 KB)
PDF(1125 KB)

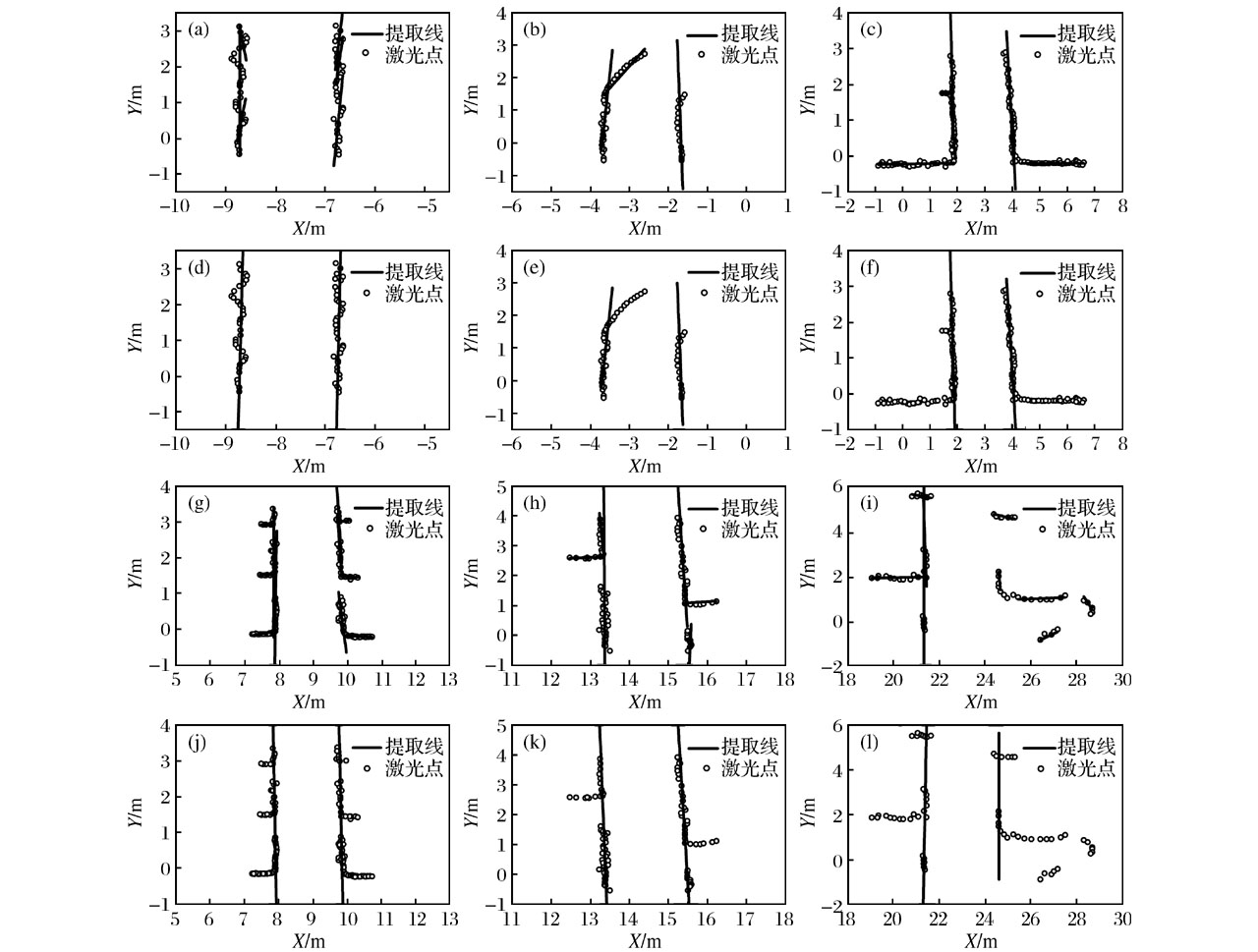
Roadway Edge Detection Algorithm Based on RANSAC in Underground Mine
Lin BI,Changming DUAN,Zhuli REN
Gold Science and Technology ›› 2020, Vol. 28 ›› Issue (1) : 105-111.
PDF(1125 KB)
PDF(1125 KB)
Roadway Edge Detection Algorithm Based on RANSAC in Underground Mine
 ({{custom_author.role_en}}), {{javascript:window.custom_author_en_index++;}}
({{custom_author.role_en}}), {{javascript:window.custom_author_en_index++;}}| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|

/
| 〈 |
|
〉 |







 甘公网安备 62010202000672号
甘公网安备 62010202000672号