黄金科学技术 ›› 2021, Vol. 29 ›› Issue (1): 136-146.doi: 10.11872/j.issn.1005-2518.2021.01.089
王京华( ),王李管,毕林()
),王李管,毕林()
Jinghua WANG(),Liguan WANG,Lin Bi()
摘要:
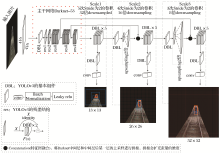
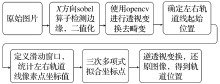
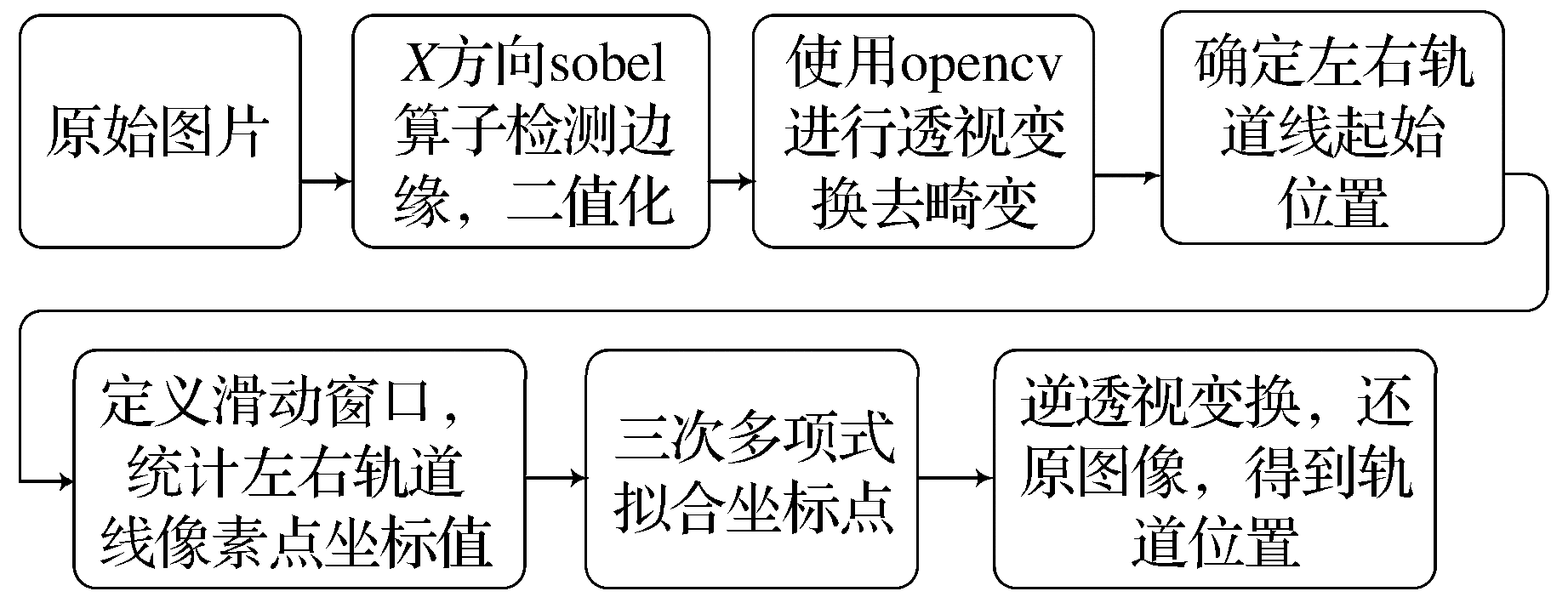
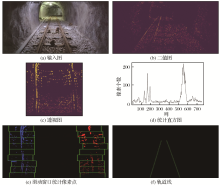
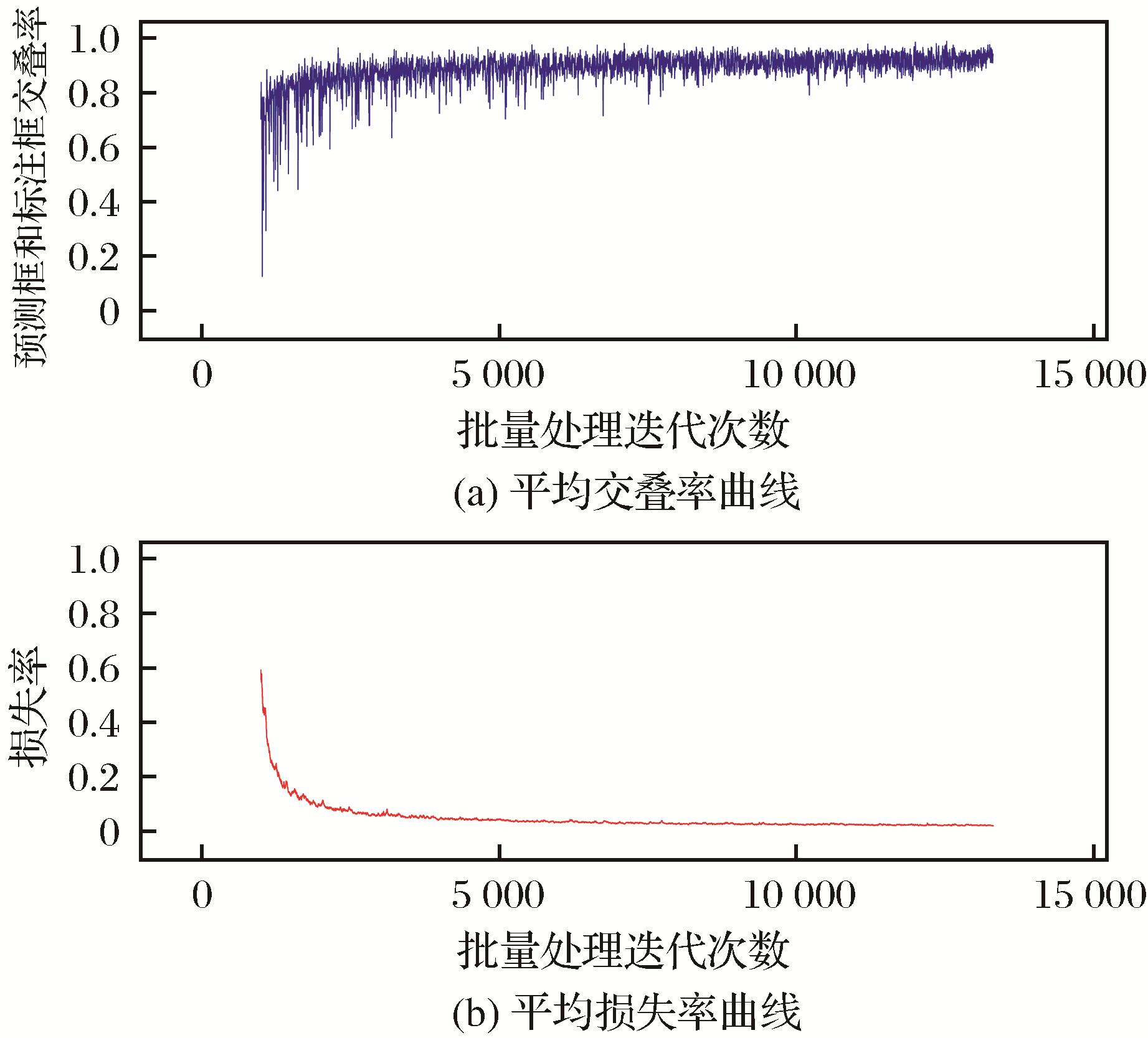
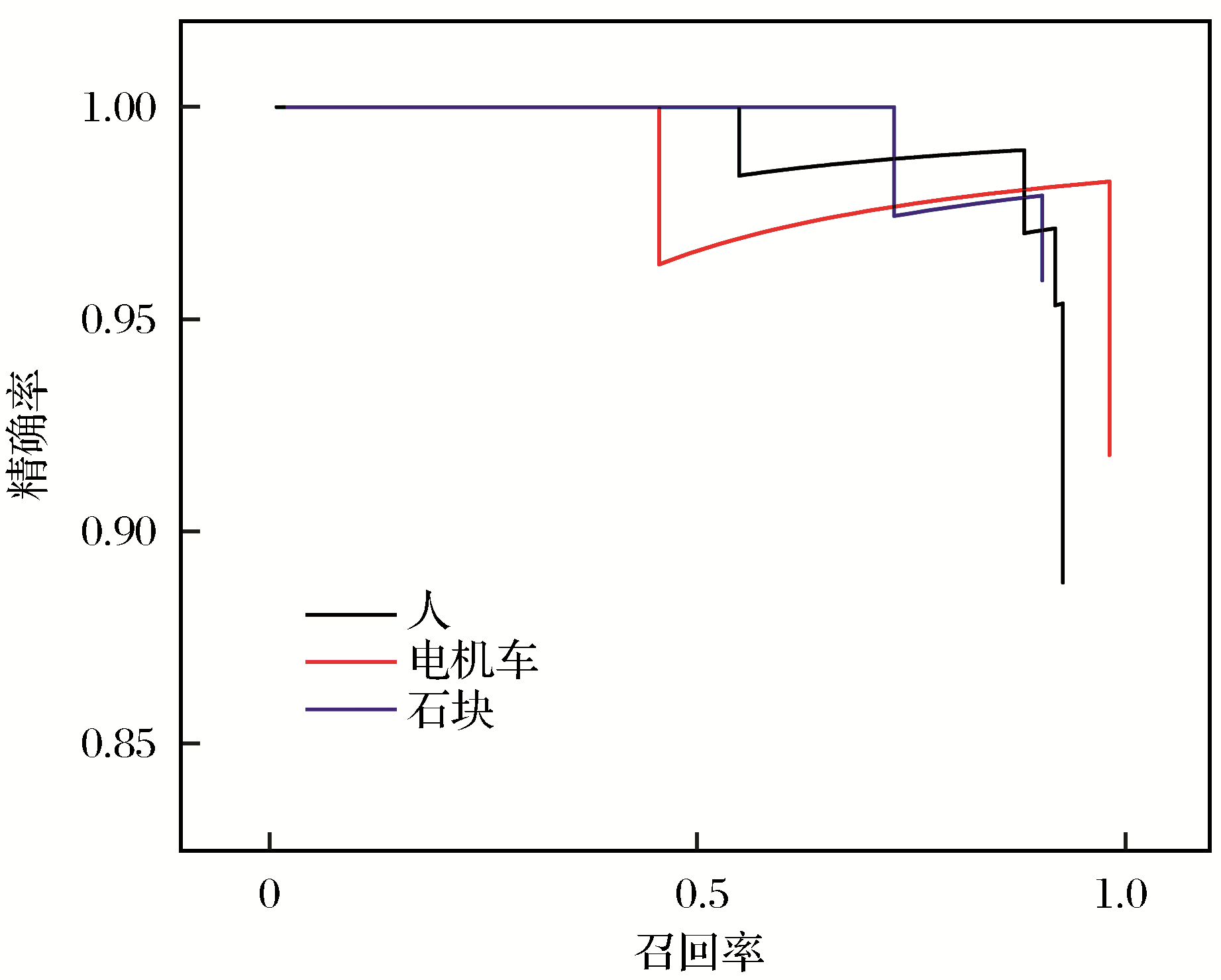
针对传统计算机视觉方法难以实现障碍物实时检测和定位的问题,提出传统计算机视觉技术与深度学习目标检测算法YOLOv3相结合的障碍物智能检测方法。首先,采集电机车行驶区域(即有效检测区域)存在的障碍物数据并制作VOC格式数据集,使用YOLOv3训练数据集,得到障碍物检测模型;然后,采用传统计算机视觉技术定位到轨道,使用“3邻域”搜索法获得轨道线坐标值,根据距离信息向轨道外侧扩展一定距离,提取有效检测区域,同时网格化图片,将障碍物的坐标换算为实际距离;最后,使用障碍物检测模型对有效检测区域进行检测。试验结果表明:该方法可以识别行驶区域内多种特征差异很大的目标物体,如电机车、人和大块落石等;该方法每秒可以处理6帧图片,现场采集的实际数据测试平均精确率达到93.2%。
中图分类号:
| Deng J,Dong W,Socher R,al et,2009.ImageNet:A large-scale hierarchical image database[C]//2009 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR 2009).Miami:IEEE:248-255. | |
| Dewan A,Caselitz T,Tipaldi G D,al et,2016. Motion-based detection and tracking in 3D LiDAR scans[C]// 2016 IEEE International Conference on Robotics and Automation (ICRA). Washington DC:IEEE:4508-4513. | |
| Guo Chunming,2019.Obstacle detection method in front of track based on video image[J].Electronic Measurement Technology,42(12):55-59. | |
| Güzel M S,Zakaria W,2013.A hybrid architecture for vision-based obstacle avoidance[J].Advances in Mechanical Engineering,5:545-550. | |
| He K M,Zhang X Y,Ren S Q,al et,2016.Deep residual learning for image recognition[C]//2016 IEEE Conference on Computer Vision and Pattern Recognition(CVPR). Las Vegas:IEEE:770-778. | |
| He K,Gkioxari G,Dollár P,al et,2020.Mask R-CNN[J].IEEE Transactions on Pattern Analysis & Machine Intelligence,42(2):386-397. | |
| Lin T Y,Dollár P,Girshick R,al et,2017.Feature pyramid networks for object detection[C]//2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR).Honolulu:IEEE:936-944. | |
| Lin T,Maire M,Belongie S,al et,2014.Microsoft COCO:Common objects in context[C]//Computer Vision-ECCV 2014.Cham:Springer:740-755. | |
| Liu L,Ouyang W,Wang X,al et,2018.Deep learning for generic object detection:A survey[J].International Journal of Computer Vision,128(2):261-318. | |
| Liu Wenqi,2016.Detection Algorithm of Railway Foreign Body Based on Depth Neural Network [D].Beijing:Beijing Jiaotong University. | |
| Lou Xinyu,Wang Hai,Cai Yingfeng,al et,2019. Research on real-time road obstacle detection and classification algorithm using 64 line lidar [J]. Automotive Engineering,41(7):779-784. | |
| Redmon J,Divvala S,Girshick R,al et,2016.You only look once:Unified,real-time object detection[C]// 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Las Vegas:IEEE:779-788. | |
| Redmon J,Farhadi A,2017. YOLOv3:An incremental improvement[C]// IEEE Conference on Computer Vision and Pattern Recognition(CVPR).Honolulu:IEEE:779-788. | |
| Ruder M,Mohler N,Ahmed F,2003.An obstacle detection system for automated trains[C]//Intelligent Vehicles Symposium. Washington DC:IEEE:180-185. | |
| Song Huaibo,He Dongjian,Xin Xiangjun,2011.Unstructured road detection and obstacle recognition based on machine vision [J].Journal of Agricultural Engineering,27(6):225-230. | |
| Tong Lei,Zhu Liqiang,Yu Zujun,al et,2012.Detection of track foreign matters based on vehicle mounted forward-looking camera[J].Transportation System Engineering and Information,12 (4):79-83. | |
| Wang Xinzhu,Li Jun,Li Hongjian,al et,2016.Automatic obstacle detection method based on 3D lidar and depth image [J]. Journal of Jilin University(Engineering Edition),46(2):360-365. | |
| Xie Desheng,Xu Youchun,Wang Rendong,al et,2018.Obstacle detection and tracking of unmanned vehicle based on 3D lidar[J]. Automotive Engineering,(8):952-959. | |
| Zhuang Fuzhen,Luo Ping,He Qing,al et,2015.Research progress of transfer learning[J].Journal of Software,26(1):26-39. | |
| 郭春明,2019.基于视频图像的轨道前方障碍物检测方法[J].电子测量技术,42(12):55-59. | |
| 刘文祺,2016.基于深度神经网络的铁路异物检测算法[D].北京:北京交通大学. | |
| 娄新雨,王海,蔡英凤,等,2019.采用64线激光雷达的实时道路障碍物检测与分类算法的研究[J].汽车工程,41(7):779-784. | |
| 宋怀波,何东健,辛湘俊,2011.基于机器视觉的非结构化道路检测与障碍物识别方法[J].农业工程学报,27(6):225-230. | |
| 同磊,朱力强,余祖俊,等,2012.基于车载前视摄像机的轨道异物检测[J].交通运输系统工程与信息,12(4):79-83. | |
| 王新竹,李骏,李红建,等,2016.基于三维激光雷达和深度图像的自动驾驶汽车障碍物检测方法[J].吉林大学学报(工学版),46(2):360-365. | |
| 谢德胜,徐友春,王任栋,等,2018.基于三维激光雷达的无人车障碍物检测与跟踪[J].汽车工程,(8):952-959. | |
| 庄福振,罗平,何清,等,2015.迁移学习研究进展[J].软件学报,26(1):26-39. |
| [1] | 谭正华,文阳,王李管,李国泰. 基于关键链的地下矿采掘计划编制优化方法[J]. 黄金科学技术, 2021, 29(4): 602-611. |
| [2] | 李杰林,杨承业,彭朝智,周科平,刘锐凯. 三维激光扫描技术在地下巷道岩体结构面识别的应用[J]. 黄金科学技术, 2021, 29(2): 236-244. |
| [3] | 毕林,王黎明,段长铭. 矿井环境高精定位技术研究现状与发展[J]. 黄金科学技术, 2021, 29(1): 3-13. |
| [4] | 戚伟,李威,李振阳,赵国彦. 基于CRITIC-CW法的地下矿岩体质量评价[J]. 黄金科学技术, 2020, 28(2): 264-270. |
| [5] | 毕林,段长铭,任助理. 基于RANSAC的地下矿山巷道边线检测算法[J]. 黄金科学技术, 2020, 28(1): 105-111. |
| [6] | 胡建华,徐朔寒,徐泽林,韩磊. 城市地下矿山采矿方法的数值与熵权耦合优选[J]. 黄金科学技术, 2019, 27(4): 513-521. |
| [7] | 刘定一, 王李管, 陈鑫, 钟德云, 徐志强. 地下矿中长期计划多目标优化及应用研究[J]. 黄金科学技术, 2018, 26(2): 228-233. |
| [8] | 聂兴信,张国丹. 基于熵值法—突变理论的地下矿山紧急避险系统可靠性研究[J]. 黄金科学技术, 2016, 24(6): 72-77. |
| [9] | 陈建宏,曾闵,李涛,江时雨. 基于物元分析—未确知测度理论的地下矿山安全避险“六大系统”可靠性评估方法[J]. 黄金科学技术, 2015, 23(1): 80-84. |
|
©2018 黄金科学技术编辑部
电话:0931-8277791
E-mail: hjkx@lzb.ac.cn 邮编:730000

















 甘公网安备 62010202000672号
甘公网安备 62010202000672号